CUDA 背景知识
Categories: Hpc
一 GV100 硬件架构概述
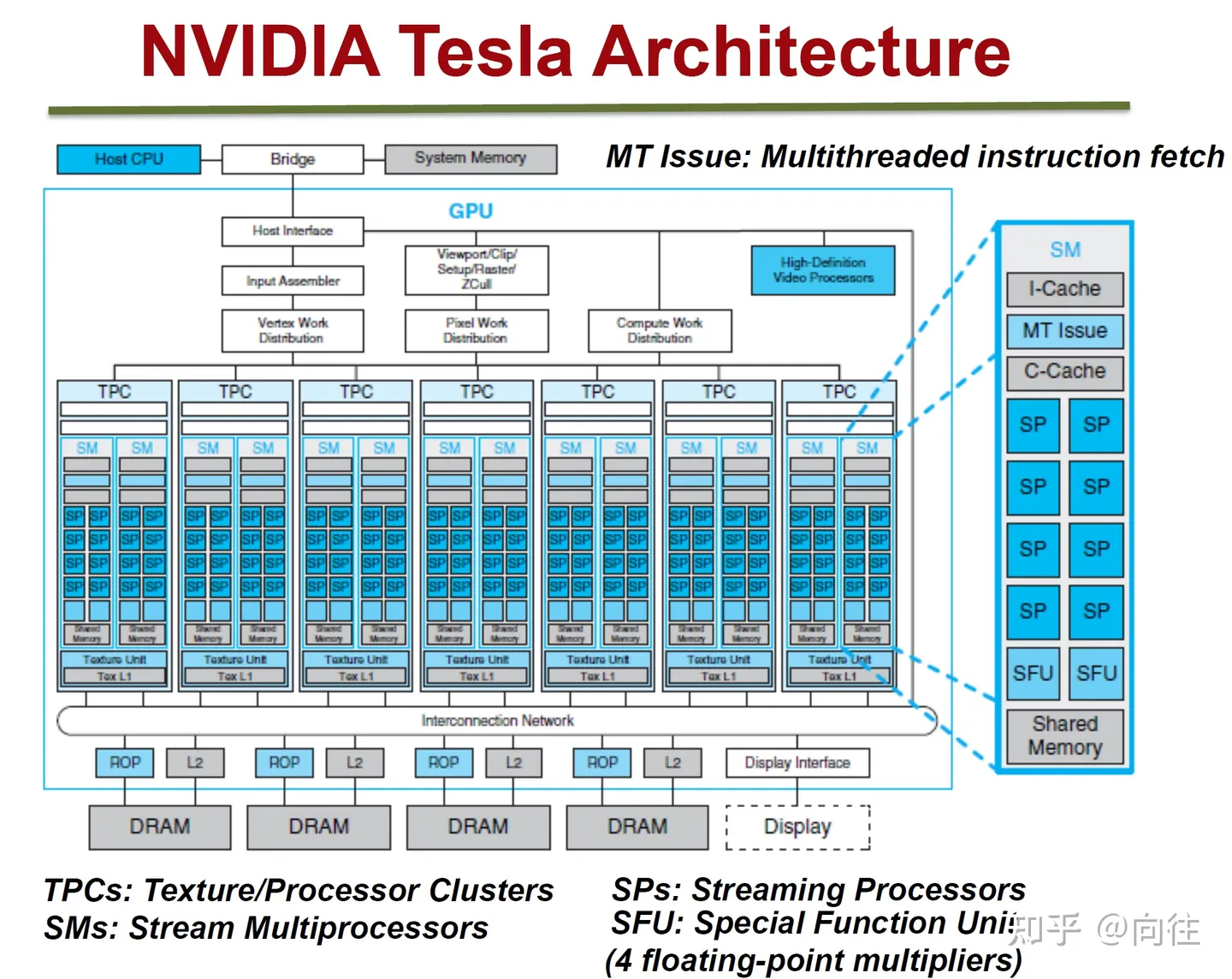
GPU的微观结构因不同厂商、不同架构都会有所差异,但核心部件、概念、以及运行机制大同小异,NVidia Tesla 微观架构如下图所示:
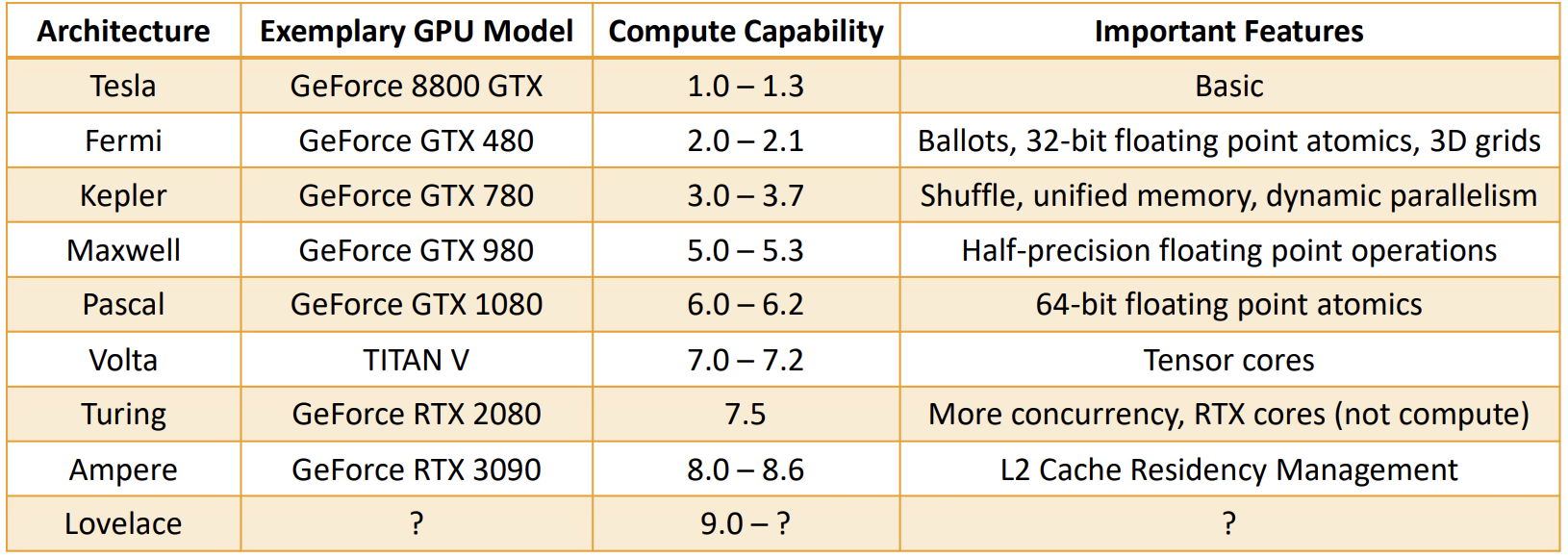
下表是一份粗略的总结,介绍了不同计算能力如何对应于各个架构代际,以及它们在相应时代的 GPU 型号中引入的一些关键功能。
GV100 GPU 由多个 GPU 处理集群 (GPC)、纹理处理集群 (TPC)、流式多处理器 (SM-STREAMING MULTIPROCESSOR) 和内存控制器组成。完整的 GV100 GPU 包括:
6个GPC,每个 GPC 都有:7个TPC(每个包含两个 SM)14个SM
84个 VoltaSM,每个SM都有:- 64 个 FP32 核心
- 64 个 INT32 核心
- 32 个 FP64 核心
- 8 个张量核心(Tensor Cores)
- 4 个纹理单元(texture units)
- 8 个 512 位内存控制器(总共 4096 位)
总结: 一个完整的 GV100 GPU 含有 84 个 SM,总共有 5376 个 FP32 核心、5376 个 INT32 核心、2688 个 FP64 核心、672 个Tensor Cores 和 336 个纹理单元。 每个 HBM2 DRAM 堆栈都由一对内存控制器控制。 完整的 GV100 GPU 包括总计 6144 KB 的二级缓存。
下图显示了具有 84 个 SM 的完整 GV100 GPU(注意,不同的产品可以使用不同配置的 GV100)。Tesla V100 加速器使用 80 个 SM。

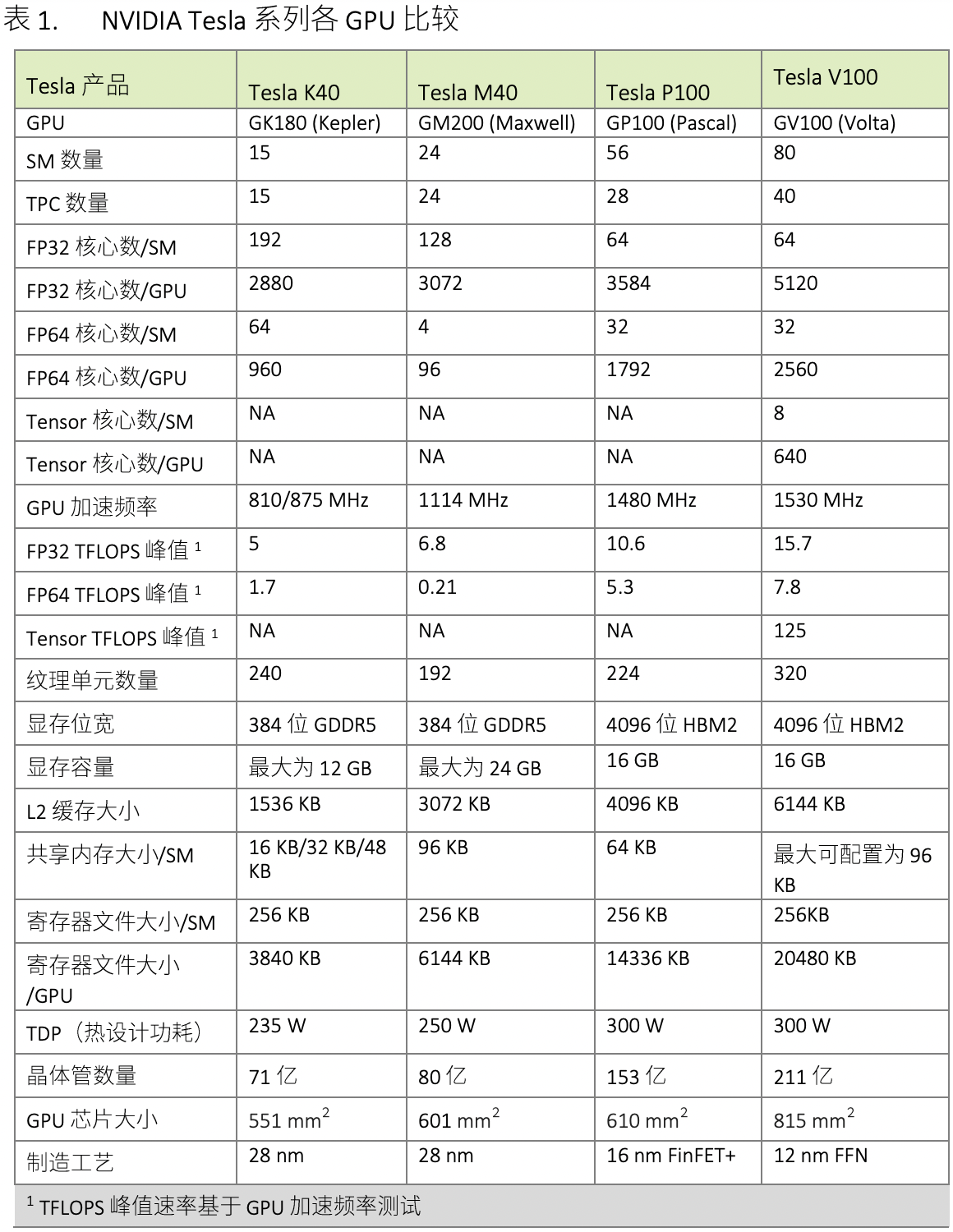
表 1 比较了过去五年的 NVIDIA Tesla GPU。
下表展示了 NVIDIA Tesla GPU 的比较。
1.1 Volta SM 硬件结构
GV100 GPU 有 84 个 SM。与 Pascal GP100 类似,GV100 的每个 SM 都包含 64 个 FP32 内核和 32 个 FP64 内核。 但是,GV100 SM 使用了一种新的分区方法来提高 SM 利用率和整体性能。
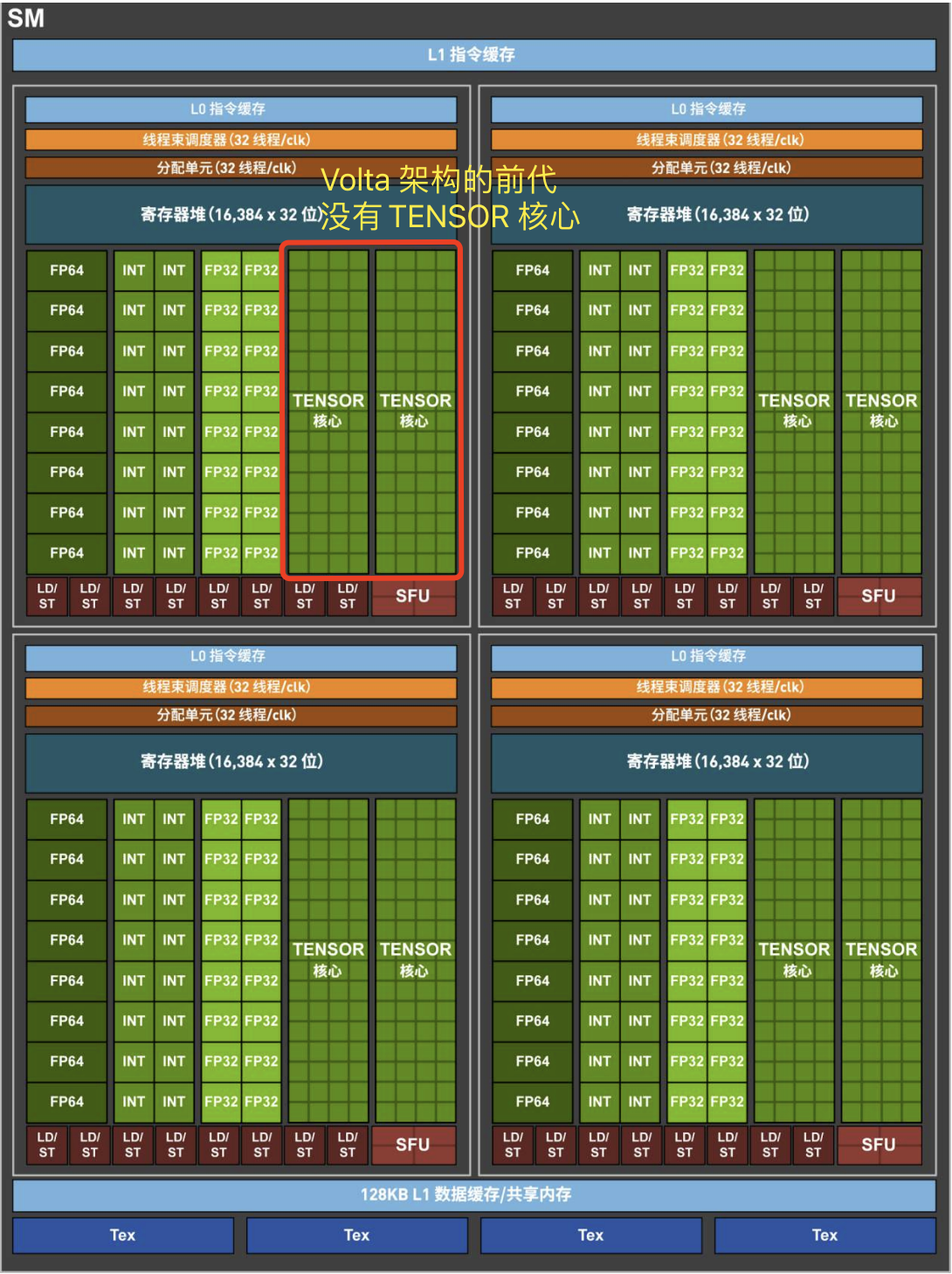
GP100SM被划分为两个处理块,每个处理块具有32个 FP32 内核、16 个 FP64 内核、一个指令缓冲区、一个warp调度程序、两个调度单元和一个 128 KB 的寄存器文件。GV100SM分为四个处理块,每个处理块有16个 FP32 内核、8 个 FP64 内核、16 个 INT32 内核、两个用于深度学习矩阵运算的新混合精度 Tensor 内核、一个新的 L0 指令缓存、一个 warp 调度程序、一个调度单元和一个 64 KB 的寄存器文件。新的 L0 指令缓存现在用于每个分区,用以提供比以前的 NVIDIA GPU 中使用的指令缓冲区更高的效率。
总的来说,与前几代 GPU 相比,GV100 支持更多的线程、线程束和线程块。 共享内存和 L1 资源的合并使每个 Volta SM 的共享内存容量增加到 96 KB,而 GP100 为 64 KB。
Volta GV100 流式多处理器(SM)架构如下图像所示:
1.2 归约操作
归约操作(Reduction Operation)是一种将多个数据值组合成一个单一值的运算。在并行计算中,归约操作通常用于将分散在不同处理器或计算节点上的数据(如梯度)汇总起来,以便进行全局计算或同步。归约操作可以是简单的,如求和(Sum)、求平均(Mean)、求最大值(Max)或求最小值(Min),也可以是更复杂的自定义运算。
二 GPU 设备管理
2.1 使用运行时 API 查询 GPU 信息
可以使用以下函数查询关于 GPU 设备的所有信息:
cudaError t cudaGetDeviceProperties(cudaDeviceProp* prop, int device);
cudaDeviceProp 结构体包含了 CUDA 设备的属性信息,可以通过该网址查看其内容。以下是一些关键成员及其意义:
- name: 设备的名称(字符串)。
totalGlobalMem: 设备的全局内存总量(以字节为单位)。sharedMemPerBlock: 每个线程块的共享内存大小(以字节为单位)。regsPerBlock: 每个线程块的寄存器数量。- warpSize: 每个 warp 的线程数量(通常为 32)。
- maxThreadsPerBlock: 每个线程块的最大线程数。
- maxThreadsDim[3]: 每个线程块在 3 个维度(x, y, z)上的最大线程数。
- maxGridSize[3]: 网格在 3 个维度(x, y, z)上的最大尺寸。
- clockRate: 核心时钟频率(以千赫兹为单位)。
- totalConstMem: 设备的常量内存大小(以字节为单位)。
multiProcessorCount: 多处理器的数量(SM 数量)。computeCapability: 计算能力,包含 major 和 minor 版本号。
实例代码如下所示:
#include <stdio.h>
#include <cuda_runtime.h>
int main() {
int deviceCount;
cudaGetDeviceCount(&deviceCount);
for (int device = 0; device < deviceCount; device++) {
cudaDeviceProp prop;
cudaGetDeviceProperties(&prop, device);
printf("Device %d: %s\n", device, prop.name);
printf(" Total Global Memory: %lu bytes\n", prop.totalGlobalMem);
printf(" Shared Memory Per Block: %lu bytes\n", prop.sharedMemPerBlock);
printf(" Registers Per Block: %d\n", prop.regsPerBlock);
printf(" Warp Size: %d\n", prop.warpSize);
printf(" Max Threads Per Block: %d\n", prop.maxThreadsPerBlock);
printf(" Max Threads Dimension: (%d, %d, %d)\n",
prop.maxThreadsDim[0], prop.maxThreadsDim[1], prop.maxThreadsDim[2]);
printf(" Max Grid Size: (%d, %d, %d)\n",
prop.maxGridSize[0], prop.maxGridSize[1], prop.maxGridSize[2]);
printf(" Clock Rate: %d kHz\n", prop.clockRate);
printf(" Total Constant Memory: %lu bytes\n", prop.totalConstMem);
printf(" Multi-Processor Count: %d\n", prop.multiProcessorCount);
printf(" Compute Capability: %d.%d\n", prop.major, prop.minor);
}
return 0;
}
编译运行代码后输出结果如下所示:
Device 0: GeForce GTX 1080
Total Global Memory: 8589934592 bytes
Shared Memory Per Block: 49152 bytes
Registers Per Block: 65536
Warp Size: 32
Max Threads Per Block: 1024
Max Threads Dimension: (1024, 1024, 64)
Max Grid Size: (2147483647, 65535, 65535)
Clock Rate: 1733000 kHz
Total Constant Memory: 65536 bytes
Multi-Processor Count: 20
Compute Capability: 6.1
2.2 使用 nvidia-smi 查询 GPU 信息
使用 nvidia-smi 工具的常用命令:
# 1, 持续监控 GPU 使用情况(每秒更新一次)
nvidia-smi -l 1
# 2, 以 CSV 格式输出 GPU 的索引、名称、驱动程序版本、总内存和已用内存的信息,方便进一步处理或分析
nvidia-smi --query-gpu=index,name,driver_version,memory.total,memory.used --format=csv
# 3, 显示所有 GPU 的进程信息
nvidia-smi pmon -s um
2.3 在运行时设置设备
对于于一个有 N 个 GPU 的系统,nvidia-smi 从 0 到 N―1 标记设备 ID。使用环境变量 CUDA_VISIBLE_DEVICES,就可以在运行时指定所选的GPU 且无须更改应用程序。
例如,设置运行时环境变量 CUDA_VISIBLE_DEVICES=2。nvidia 驱动程序会屏蔽其他GPU,这时设备 2 作为设备 0 出现在应用程序中。
也可以使用CUDA_VISIBLE_DEVICES指定多个设备。例如,如 CUDA_VISIBLE_DEVICES=2,3,在运行时,nvidia 驱动程序将只使用 ID 为 2 和 3 的设备,并且会将设备 ID 分别映射为 0 和 1。
三 内核函数计时和性能判断
3.1 用 CPU 计时器计时
最简单的方法是在主机端使用一个 CPU 或 GPU 计时器来计算内核的执行时间。
1,借助 time.h 库实现计时功能:
int iLen = 1024;
dim3 block (iLen);
dim3 grid ((N + block - 1) / block)
clock_t start, end;
double cpu_time_used;
start = clock(); // 开始时间
addArrays<<<grid, block>>>(d_array1, d_array2, d_result);
cudaDeviceSynchronize() // 等待所有的 GPU 线程运行结束
end = clock(); // 结束时间
cpu_time_used = ((double)(end - start)) / CLOCKS_PER_SEC; // 计算运行时间
printf("sumArraysOnGPU <<<%d, %d>>> Time taken: %f seconds\n", grid.x, block.x, cpu_time_used);
3.2 用 nvprof 工具计时
自CUDA 5.0以来,NVIDIA 提供了一个名为 nvprof 的命令行分析工具,可以帮助从应用程序的 CPU 和 GPU 活动情况中获取时间线信息,其包括内核执行、内存传输以及 CUDA API 的调用。其用法如下:
nvprof [nvprof_args] <application> [application_args]
1,基本使用:要分析一个 CUDA 程序,你可以直接用 nvprof 来运行它:
nvprof ./your_cuda_program
2,分析特定内核:如果你只对特定的内核感兴趣,可以使用 –kernels 选项来指定:
nvprof --kernels kernel_name ./your_cuda_program
3,查看内存传输情况:要查看内存传输(数据从主机到设备或设备到主机)的统计信息:
nvprof --print-gpu-trace ./your_cuda_program
4,结合其他工具:nvprof 可以与 nvvp(NVIDIA Visual Profiler)配合使用,生成 .nvprof 文件并用图形化工具进一步分析。
nvprof --output profile.nvprof ./your_cuda_program
nvvp profile.nvprof
注意:NVIDIA 已经建议使用 Nsight Compute 和 Nsight Systems 作为 nvprof 的替代工具,这些工具提供了更强大和全面的性能分析功能。
3.3 用 nvprof 检测内存操作
以二维矩阵求和函数为例:
__global__ void sumMatrixOnGPu2D(float *A, float *B, float *C, int NX, int Ny){
unsigned int ix = blockIdx.x*blockDim.x + threadIdx.x;
unsigned int iy = blockIdx.y * blockDim.y + threadIdx.y;
unsigned int idx = iy * NX + ix; // 内存索引 idx 的计算原理参考前文代码
if (ix < NX && iy < NY)
C[idx]=A[idx]+ B[idx];
}
测试一组基础线程块的配置,尤其是大小为(32,32),(32,16),(16,32)和(16,16)的线程块。在 Tesla M2070 上输出以下结果:
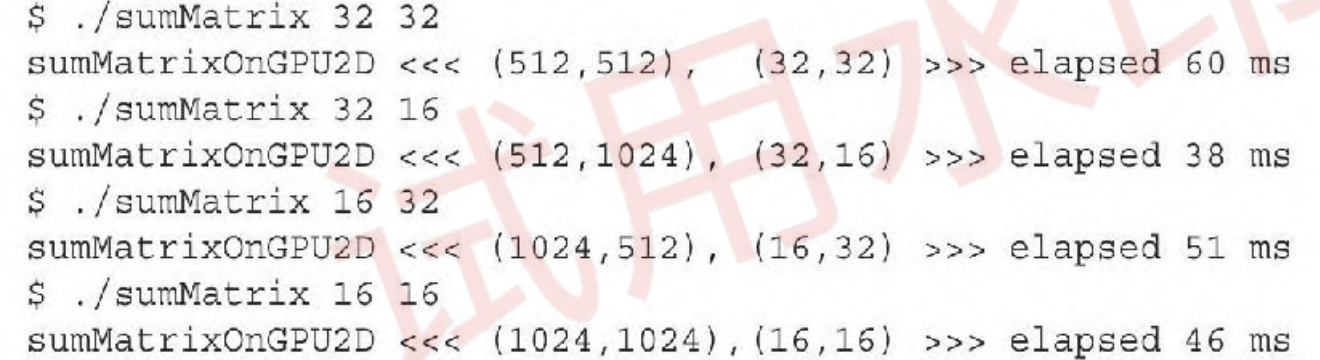
在 sumMatrix 内核函数中(C[idx]=A[idx]+B[idx])中有 3 个内存操作:两个内存加载和一个内存存储。可以使用 nvprof 检测这些内存操作的效率。
首先,用 gld_throughput 指标检查内核的内存的读取吞吐量,从而得到每个执行配置的差异:
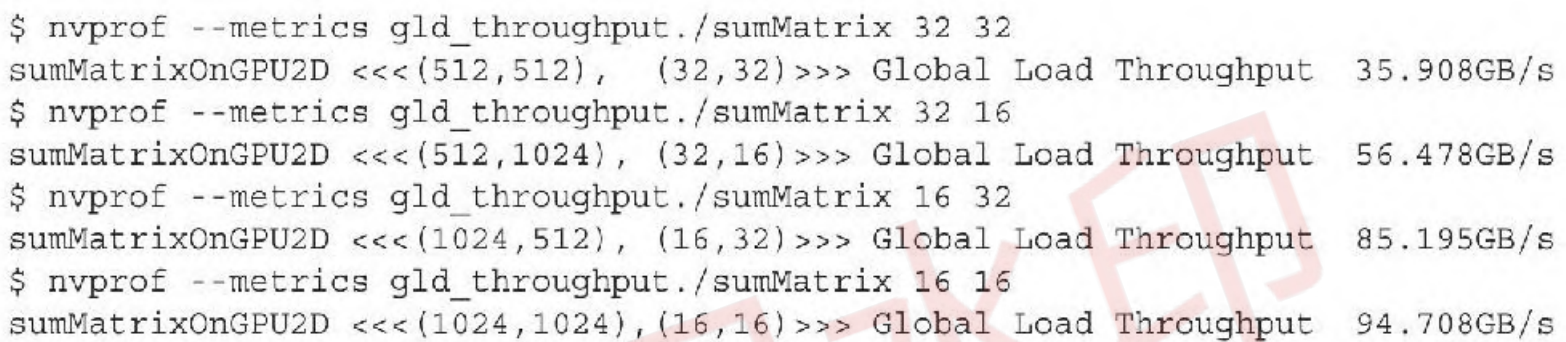 第四种情况中的加载吞吐量最高,第二种情况中的加载吞吐量大约是第四种情况的一半,但第四种情况却比第二种情况慢。所以,更高的加载吞吐量并不一定意味着更高的性能。
第四种情况中的加载吞吐量最高,第二种情况中的加载吞吐量大约是第四种情况的一半,但第四种情况却比第二种情况慢。所以,更高的加载吞吐量并不一定意味着更高的性能。
其次,用 gld_efficiency 指标检测全局内存加载效率,它表示每次全局内存加载请求中,实际被使用的数据字节与总加载数据字节的比值,计算公式如下:
\[\text{gld\_efficiency} = \frac {实际使用的全局内存加载字节数}{总全局内存加载字节数} \times 100\%\]- 实际使用的全局内存加载字节数:核函数中实际被线程使用的字节数。
- 总全局内存加载字节数:核函数中所有线程加载的总字节数,包括未使用或无效的数据。
gld_efficiency 越高,说明内存访问越高效,优化方法是使用对齐访问、减少分支和提高内存访问的空间局部性。
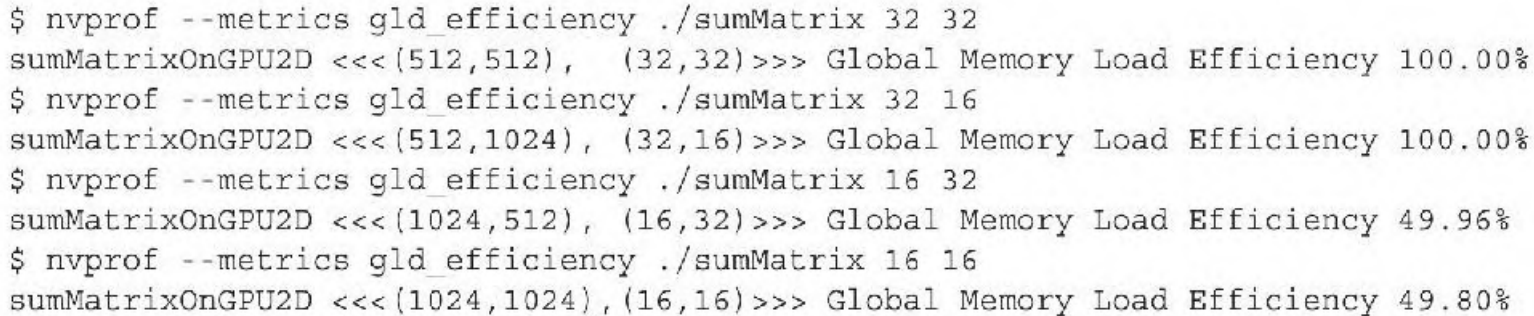 最后两种情况下的加载效率是最前面两种情况的一半。这解释了为什么最后两种情况下更高的加载吞吐量和可实现占用率没有产生较好的性能,因为加载的有效性(即效率)是较低的。
最后两种情况下的加载效率是最前面两种情况的一半。这解释了为什么最后两种情况下更高的加载吞吐量和可实现占用率没有产生较好的性能,因为加载的有效性(即效率)是较低的。
最后两种情况的共同特征是它们在最内层维数中块的大小是线程束的一半。如前所述,对网格和块启发式算法来说,最内层的维数(block.x)应该总是线程束大小的倍数。
3.4 GPU 的理论最大性能
应用程序的测量值与理论峰值进行比较,可以判定你的应用程序的性能是受限于算法还是受限于内存带宽的。以 Tesla K10 为例,可以得到理论上的操作:字节比率(ops:byte ratio):
也就是 13.6个指令:1个字节。对于 Tesla K10 而言,如果你的应用程序每访问一个字节所产生的指令数多于 13.6,那么你的应用程序受算法性能限制,GPU 将被充分利用;反之则受访存限制,GPU 没有被充分应用。
参考资料
- 《CUDA C 编程权威指南》
- GPU Architecture and Programming