transformer论文解读
Categories: Transformer
- 1. 相关工作
- 2. 模型架构
- 3. 如何理解 Layer Norm
- 4. Encoder 和 Decoder 结构
- 5. 从 attention 到 Scaled Dot-Product Attention
- 6. Multi-Head Attention
- 7. Transformer 的三个 multi-head attention 的原理和作用
- 8. Embedding 和 Softmax 层
- 9. Positional Encoding
- 10. 为什么使用 self-attention!
- 11,为什么只有 kv cache 没有 q cache?
- 参考资料
1. 相关工作
CNN 的的卷积核窗口大小有限,每次只能看比较短的部分序列,但是它的多通道机制被认为可以去识别多模式,transformer 论文参考这个机制,在 attention 的机制进一步引出了 Muti-Head Attention,来模拟卷积层的多输出通道效果。
Self-attention 在 transformer 论文之前已经有人提出,但 transformer 是第一个只依赖自注意力机制(self-attnetion)来实现 encoder-decoder 架构的模型。
2. 模型架构
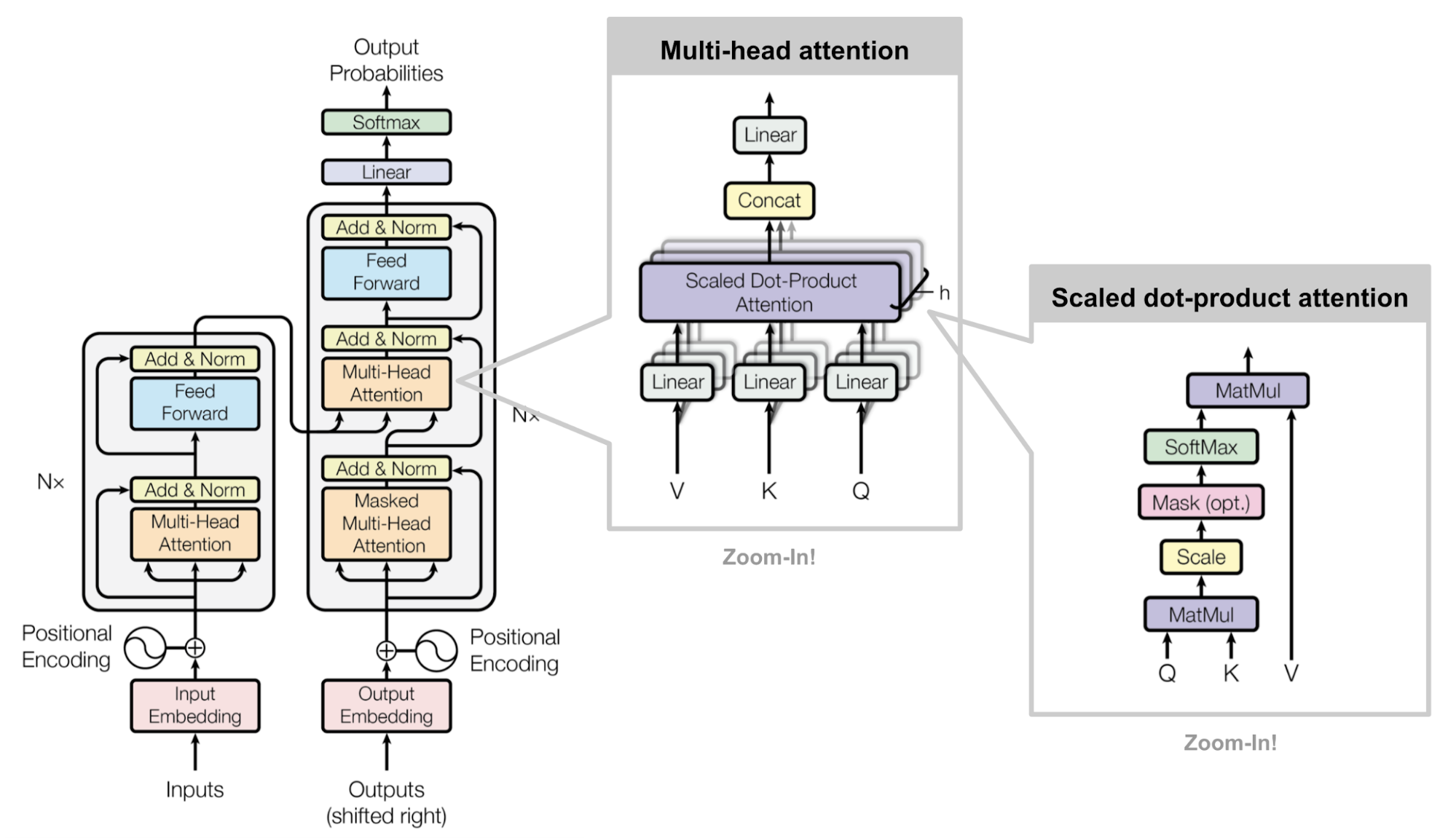
(直到 GPT 出来之前)大多数有竞争力的神经序列转换模型都是采用编码器-解码器结构,transformer 模型也不例外。
编码器将输入的符号表示序列 ($x_1,x_2,…,x_n$) 映射为一个连续表示序列 ($z_1,z_2,…, z_n$)。得到编码器输出序列 $z$ 后,解码器逐个元素的生成符号的输出序列 ($y_1,y_2…,y_m$)。解码器输出是自回归的,将当前轮的输出和输入拼接,作为下一轮的输入。
Transformer 的基本组件是: point-wise、self-attention、add & norm、feed forward、linear、softmax。
为了方便残差连接,模型中的所有子层 Sub Layer 以及嵌入层 Embedding Layer 都生成维度为 $d_{model} = 512$ 的输出向量。
3. 如何理解 Layer Norm
NLP/Transformer 模型的输入是三维向量,batch、句子序列长度 $n$、单词映射为 embedding vector 都分别表示为一个维度。
Batch norm 和 layer norm 的区别一句话总结就是 bn 是切特征,ln 是切样本。
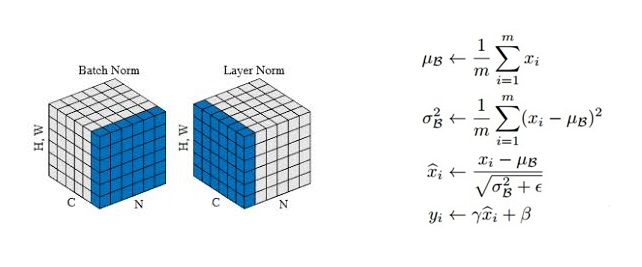
BN: 对于每个特征维度,计算它在整个批次中的均值和标准差,然后对该特征进行归一化。LN: 对每个样本单独计算其所有特征的均值和标准差,然后在该样本内进行归一化。
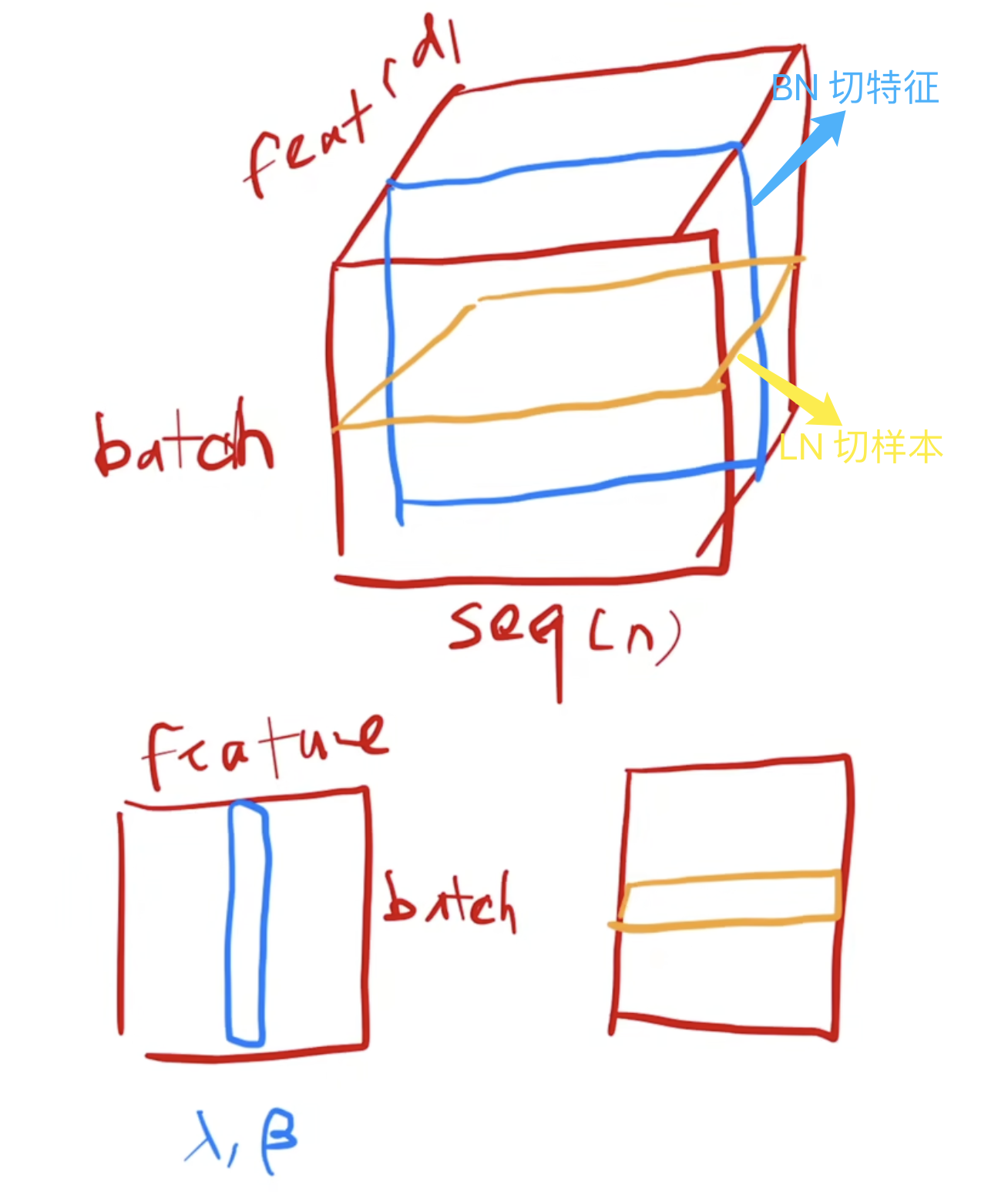
Layer Norm 层的计算可视化如下图所示:
4. Encoder 和 Decoder 结构
Decoder 同样由 $N = 6$ 个相同的层组成。Decoder 的 attention 是带掩码的,确保位置 $i$ 的预测只能依赖于小于 $i$ 的已知输出。
5. 从 attention 到 Scaled Dot-Product Attention
标准自注意力的数学表达式如下:
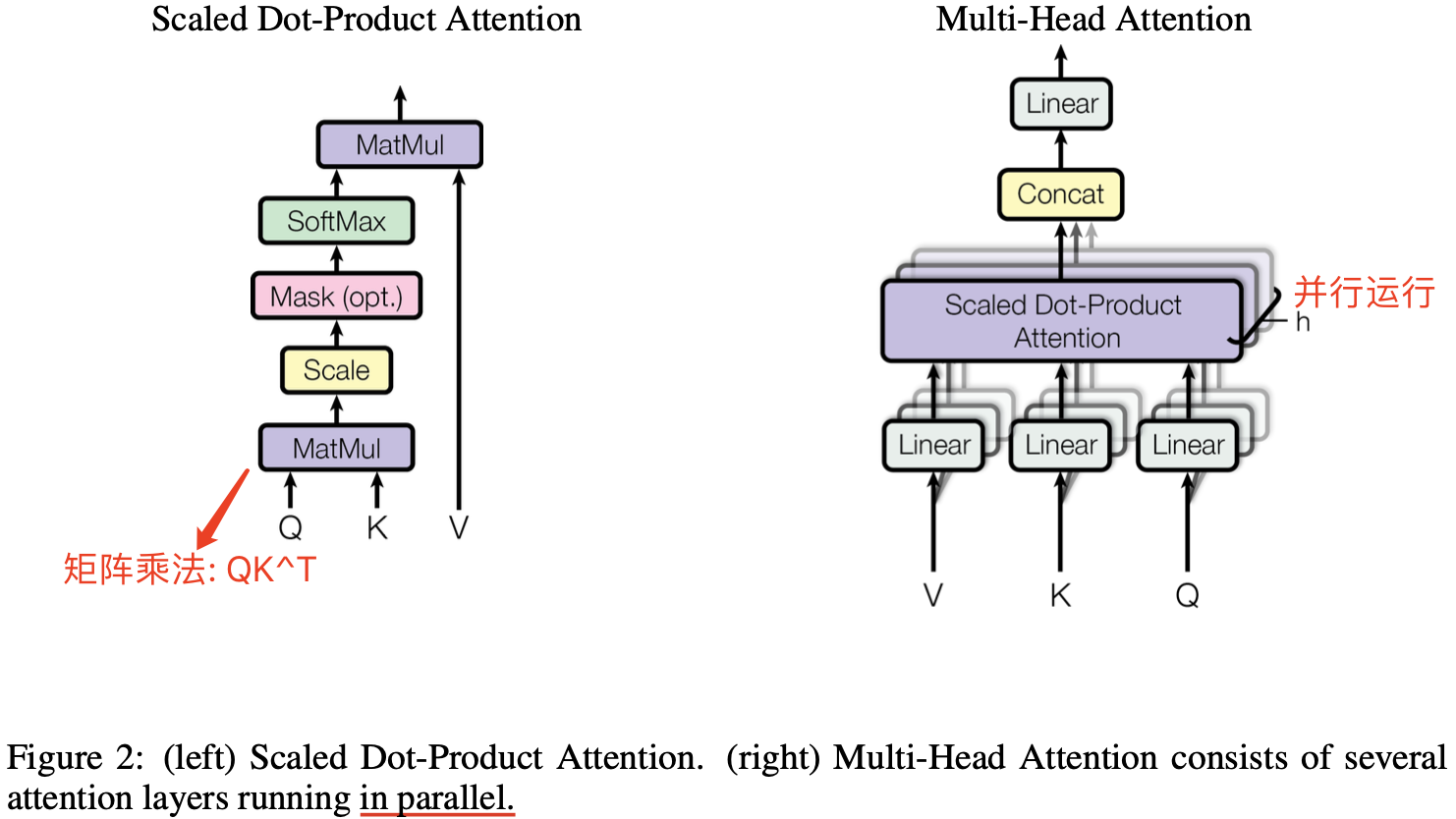
\[\text{Attention}(Q, K, V) = \text{softmax}\left(\frac{QK^T}{\sqrt{d_k}}\right)V\]1,首先,注意力函数可以描述为将一个查询(query)和一组键-值对(key-value pairs)映射到一个输出 output,$q$、$k$、$v$ 都是向量。输出都是对 value 进行加权求和得到的,每个 value 对应的权重 weight 是通过 $q$ 和 $k$ 之间的相似度计算得到。
2,将 q 和 k 的内积作为相似度(Dot-Product),然后除以向量的长度 $\sqrt{d_k}$(Scaled),结果再应用逐行做 softmax 函数,就会得到 $n$ 个非负且相加求和等于 $1$ 的权重向量,最后将权重应用于 value,就得到了最终输出 output。
余弦相似度常用来比较两个向量的相似度(距离),伪代码如下:
CosineSimilarity = sum(x[i]*y[i])/(sqrt(sum(x[i]*x[i]))*sqrt(sum(y[i]*y[i])))。
实际中,为了方便计算,会同时对一组查询(queries)计算注意力函数,将 q、k、v 都是构建成矩阵 $Q$、$K$、$V$( 维度相等),涉及到两个矩阵乘法。
3,transformer 论文中注意力机制和之前的点积注意力机制不同之处是引入了除以 $\sqrt{d_k}$ 做 scale,并使用 qk^t 点积,因为矩阵乘法更高效。
1,为什么需要做 scale:
- 引入温度调节(
scale):在 softmax 前对 qk^t 的结果矩阵除以一个系数,系数大于 1 时可以使得 softmax 输出的概率分布变得平滑,而不是接近一个one hot分布(当向量长度较大时,token 之间相似度很大,进而 softmax 结果较大的会接近 1,较小的接近于 0),从而造成梯度消失问题。有实验证明如果不 scale,模型预训练很难收敛。
2,为什么设置 $\text{scale} = \sqrt{d_k}$:
- 线性变换后的 Q 和 K 已经标准化(均值接近 0,方差接近 1),$qk^t \in \mathbb{R}^{n\times \sqrt{d_k}}$,经过 $qk^t$ 点积后的矩阵每一行均值为 0,方差为 $d_k$,因此需要除以标准差 $\sqrt{d_k}$ 以达到输出归一化的效果。
作者提出的注意力机制算法跟之前的 Dot-Product Attention 相比就是单纯多了 Scaled(除以 $\sqrt{d_k}$)。
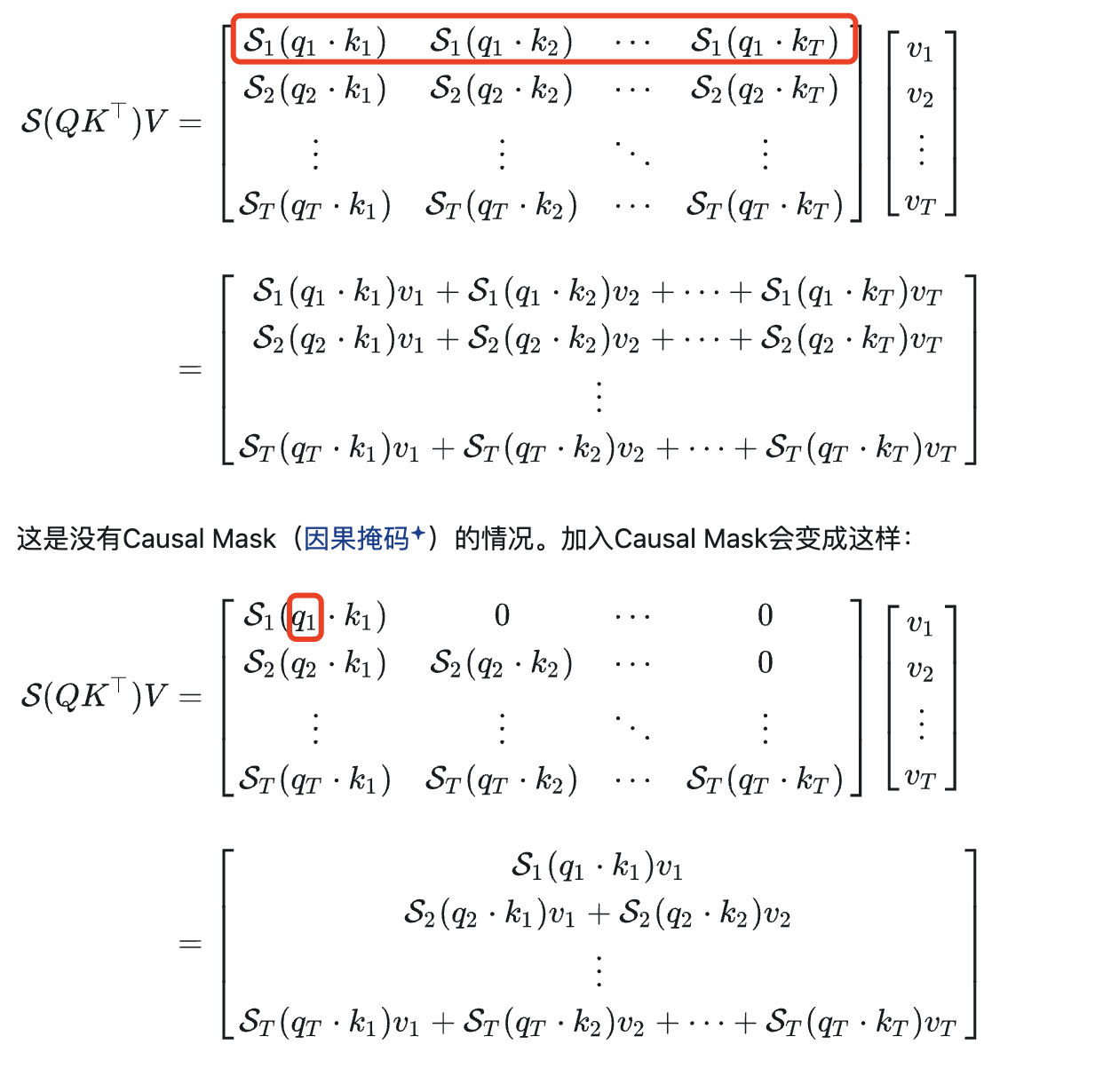
另外 decoder 模块的 attention 多了一个 Mask,实际是第 $t$ 时刻的 $q$ 只能看前面阶段的对应的 $(k, v)$ 对,计算当中表现就是对于 $q_t$ 和 $k_t$ 及其之后的那些权重值都替换成一个极大的负数,这样经过 softmax 后(做指数 $e^{w_t}$),对应位置的 $v$ 就变成了 0。
6. Multi-Head Attention
Scaled Dot-Product Attention 是不带任何参数的!
与其做单个的注意力函数,不如将 $Q$、$K$、$V$ 投影到一个低维度、投影 $h$ 次,然后再做 $h$ 次的自注意力函数,并将这 $h$ 个函数的输出拼接在一起,最后再次进行线性投影回来。
\[\text{Multi-Head Attention} = Concat(head_1,….,head_h) W^o \\ \text{Where} \ \text{head}_i = Attention (QW_i^Q, KW_i^K, VW_i^V)\]$Q$、$K$ 的线性(映射)层的权重维度是 $[d_\text{model}, d_k]$,$V$ 的线性(映射)层的权重维度是 $[d_{model}, d_v]$,输出线性(映射)层权重维度是 $[h*d_v, d_{model}]$。
多头的作用:
- 多头注意力机制可以注意到不同子空间的信息,捕捉到更加丰富的特征信息,实现类似卷积核的多通道机制的效果(论文的解释)。
- 多头的核心思想就是
ensemble(集成),每个 head 类似一个弱分类器,多个 head 的结果做 concat,可以让最后得到的 embedding 向量关注多方面的特征信息,而不会过拟合到某一种pattern上。 - 另外,多头注意力在计算上也更方便做并行计算加速;每个头的 Q、K、V 矩阵计算相互独立,无数据依赖,天然支持并行。
- 另外 head 不是越多越好,head 太多,那么每个 qkv 分到的维度就会变小,导致其表达能力也就变差,即注意力机制可能不能捕捉到 tokens 的语法/句法/词法信息。
7. Transformer 的三个 multi-head attention 的原理和作用
原理:
- 解码器中的第二个注意力层,其查询 $q$ 来自前一层的解码器层,但 $k$、$v$ 来自于编码器最后一层的输出。
- 编码器第一个注意力层:不考虑多头和线性投影层的情况,三个输入 $q$ $k$ $v$ 本质上都是一个东西,三个输入都是原始输入本身自己,输出就是输入本身的加权和,而权重又来源自己本身跟跟各个向量的相似度函数,所以也叫自注意力层(self-attention)。
- 解码器的第一个注意力层:编码器的最终输出作为 key value 输入进来,解码器下一层的输出作为 query 输入进来。
作用:
Self-Attention(自注意力):对于每个位置上的 token,Self-Attention 将其与序列中的所有其他位置进行关联,从而使模型能捕捉到句子内部的语义关系。Encoder-Decoder Attention(编码器-解码器注意力):允许解码器在生成下一个词时参考编码器的输出。这种机制实现了输入和输出序列之间的联系,是实现翻译等任务的关键所在。Masked Self-Attention(掩码自注意力):过掩码机制屏蔽掉序列中未来位置的 tokens,从而确保模型预测生成的每个 token 仅依赖于当前生成位置之前的 tokens。
从 nlp 角度理解 Attention + MLP: Attention 负责从全局的角度把整个序列的信息聚合起来(捕捉上下文信息 + 信息聚合),然后用 MLP 做语义的转换。
8. Embedding 和 Softmax 层
Embedding 层的作用学习一个长为 $d_{model}$ 的向量来表示 token,编码器和解码器的输入都需要 embedding 层,两个嵌入层和 softmax 之前的线性变换之间共享相同的权重矩阵重(维度都是一样的),并且将权重值乘以 $\sqrt{d_{model}}$。
学习 embedding 时,可能会把每个向量的 $\text{L2\ norm}$ 学得相对较小(维度越大权重值越小),乘以 $\sqrt{d_{model}}$ 后放大,使得和 PE 相加时在 scale 上匹配。
L2 归一化(L2 Norm)是一种将向量缩放到单位长度的操作,使得向量的模为1。对于一个给定向量 $\mathbf{v}$ ,L2 归一化后的向量 $\mathbf{\hat{v}}$,计算公式如下:
\[\mathbf{\hat{v}} = \frac{\mathbf{v}}{\|\mathbf{v}\|_2}\]9. Positional Encoding
Attention 层的输出本身是不具备时序信息的,因为其本质是 value 向量的一个加权和,而权重是 query 和 key 的距离,跟序列信息无关。把输入 tokens 位置打乱,attention 的输出向量的所有元素的值大小不会变化,只有元素位置的变化,这显然不符合直觉。
而 Position encoding 层的作用是使得生成的 embedding vectors 值跟位置相关(加入时序信息),更符合人类文字的意义(文字的位置打乱,相应语义肯定会变化)。它的做法是将位置信息编码为向量,并将这些向量加到输入的嵌入向量中。Positional Encoding 通常通过以下公式计算:
\[PE(pos, 2i) = \sin \left(pos/10000^{2i/d}\right) \\ PE(pos, 2i+1) = \cos \left(pos/10000^{2i/d}\right)\]10. 为什么使用 self-attention!
比较了四种不同的层:self-attention、rnn、cnn、self-attention (restricted),分别比较了计算复杂度 FLOPs、顺序操作(并行度)、最大路径长度。
- Self-Attention:能够在一层内直接捕获全局依赖关系。每个 token 都能与序列中任意位置的 token 进行信息交互,不受固定窗口大小限制。
- CNN:典型的卷积操作受限于卷积核的大小,捕获的是局部信息。虽然可以通过堆叠多层卷积或使用扩张卷积来扩大感受野,但这种扩展是逐层进行的,且依赖于网络深度。
11,为什么只有 kv cache 没有 q cache?
atten 的输出最后一行(最后一个 token)只依赖 q 的最后一行,所以当然不需 q kache,但是依赖 k 的全部行。
具体说,LLM 在 decoding 阶段的每次推理只会用到当前的 Q,这次用的 Q 下次不会用到,所以不用 Cache Q。但是每次都要用到当前和过去所有的 KV,这次用到的 KV 下次马上就要再用一次,所以 Cache KV 可以加速推理。