flashattention2 论文解读
Categories: LLM_Infer_Optimize
摘要
将 transformer 拓展到更长的序列是一个难点,而注意力层是是扩展到更长序列的主要瓶颈,因为随着序列长度的增加,标准注意力层的计算时间和内存占用呈二次方增长。FlashAttention 通过 Tiling 和 Recomputation 技术大幅减少了 cuda kernel 对 global memory 的访问量,显著节省了内存(线性而非二次)并加快了运行时间(相比优化基线提高了 2-4 倍),并且计算结果是精确而非近似的。但 FlashAttention 依然远达不到优化矩阵乘法(GEMM)操作的速度,仅达到理论最大 FLOPs/s 的 25-40%。作者观察到,这种低效是由于 GPU 上不同线程块和 warp 之间的工作分配不理想,导致了 SM 低占用率或不必要的共享内存读,由此本文提出了 FlashAttention-2,通过更好的工作分配来解决这些问题。具体来说,通过以下 3 个方法(后面两个是纯 cuda 工程极度优化):
- 优化算法以减少非矩阵乘法的 FLOPs;
- 将注意力计算并行化,即使是单个 head 也能跨不同线程块并行,以提高占用率;
- 在单个线程块内,将工作分配给不同的 warp,以减少共享内存的访问量。
与 FlashAttention 相比,这些改进带来了约 2 倍的加速,达到了 A100 上理论最大 FLOPs/s 的 50-73%,接近 GEMM 操作的效率。实验证明,当用于 GPT 类模型的端到端训练时,FlashAttention-2 在每个 A100 GPU 上的训练速度可达 225 TFLOPs/s(72% 的模型 FLOPs 利用率)。
FlashAttention [算法 1] HBM 访问次数为 $O(N^2d^2M^{-1})$,标准 Attention HBM 访问次数为 $\Theta(Nd + N^2)$。
1. 介绍
Dao 等人 [5] 提出 FlashAttention 在算法层面通过重排注意力计算,并利用经典技术(分块和重计算)显著加速注意力计算,并将内存占用从二次方降低到线性。这直接带来了相对于优化基准 2-4 倍的实际运行时间加速,以及高达 10-20 倍的内存节省,并且计算结果是精确而非近似的。
虽然 FlashAttention 已经比标准注意力机制快 2-4 倍,但其前向传播的可实现计算性能($\text{Attainable GFlops/s}$)仅达到设备理论最大 FLOPs/s 的 30-50%(见图 5),而反向传播的效率更低,仅为 A100 GPU 理论最大吞吐量的 25-35%(见图 6)。相比之下,优化的 GEMM 操作可以达到设备理论吞吐量的 80-90%。通过详细分析,作者发现 FlashAttention 在 GPU 上的线程块和 warp 之间的工作划分仍不理想,导致了较低的占用率或不必要的共享内存读写。
由此,在 FlashAttention 的基础上,作者提出了 FlashAttention-2,通过改进并行性和工作划分来解决这些问题。
2. 背景
2.1 硬件特性
GPU 性能特征。GPU 由计算单元(如浮点运算单元)和内存层次结构组成。大多数现代 GPU 包含专门的单元用于加速低精度矩阵乘法(如 Nvidia GPU 上用于 FP16/BF16 矩阵乘法的 Tensor Cores)。内存层次包括高带宽内存(HBM)和片上 SRAM(也称为共享内存)。例如,A100 GPU 具有 40-80GB 的高带宽内存(HBM),其带宽为 1.5-2.0TB/s,并且每个 108 个流式多处理器拥有 192KB 的片上 SRAM,带宽约为 19TB/s [6, 7]。由于 L2 缓存不能直接由程序员控制,因此我们在此讨论中专注于 HBM 和 SRAM。
CUDA 执行模型。GPU 通过大量线程来执行一个操作(称为 kernel)。线程被组织成线程块,线程块被调度在流式多处理器(SM)上运行。在线程块内,线程被分组为 warp(由 32 个线程组成的组)。warp 内的线程可以通过快速的 shuffle 指令进行通信,或者协作执行矩阵乘法。线程块内的 warp 可以通过读取/写入共享内存进行通信。每个 kernel 将输入从 HBM 加载到寄存器和 SRAM,进行计算,然后将输出写回 HBM。
2.2 标准 Attention 实现
给定输入序列 $Q, K, V \in \mathbb{R}^{N \times d}$,其中 $N$ 代表序列长度,$d$ 表示头维度(head dimension),我们需要计算注意力输出 $O \in \mathbb{R}^{N \times d}$:
\(S = QK^\top \in \mathbb{R}^{N \times N}, \quad P = \text{softmax}(S) \in \mathbb{R}^{N \times N}, \quad O = PV \in \mathbb{R}^{N \times d},\) 其中 softmax 是按行应用的。对于多头注意力(MHA),同样的计算会在多个头上并行执行,并在批次维度上并行(即一个批次中的输入序列数量)。
注意力的反向传播过程如下。令 $dO \in \mathbb{R}^{N \times d}$ 是相对于某个损失函数的 $O$ 的梯度。然后根据链式法则(即反向传播):
\[\begin{aligned} dV &= P^\top dO \in \mathbb{R}^{N \times d} \\ dP &= dO V^\top \in \mathbb{R}^{N \times N} \\ dS &= \text{dsoftmax}(dP) \in \mathbb{R}^{N \times N} \\ dQ &= dS K \in \mathbb{R}^{N \times d} \\ dK &= Q dS^\top \in \mathbb{R}^{N \times d} \end{aligned}\]其中 dsoftmax 是按行应用的 softmax 的梯度(反向传播)。
可以推导出,对于向量 $s$ 和 $p$,如果 $p = \text{softmax}(s)$,那么当输出梯度为 $dp$ 时,输入梯度可以表示为 $ds = (\text{diag}(p) - pp^\top) dp$。
其中 $\text{diag}(p)$ 是一个对角矩阵,其对角线上的元素为 $p$ 中的各个元素。上述公式描述了 softmax 函数的输入梯度 $ds$ 与输出梯度 $dp$ 之间的关系,同时考虑了输出概率的相互依赖性。
标准的注意力机制实现会将矩阵 $S$ 和 $P$ 写入 HBM,这需要 $O(N^2)$ 的内存。通常 $N \gg d$(典型情况下,$N$ 大约在 1k–8k 之间,而 $d$ 大约在 64–128 之间)。标准注意力的实现步骤:
- 调用矩阵乘法(GEMM)子程序计算 $S = QK^\top$,并将结果写入
HBM, - 然后从
HBM加载 $S$,计算 softmax,将结果 $P$ 写入 HBM, - 最后调用
GEMM计算 $O = PV$。
由于大多数操作都受限于内存带宽,大量的内存访问会导致较慢的实际执行时间。此外,额外需要存储 $S$ 和 $P$ 的内存占用量为 $O(N^2)$。并且,为了反向传播时计算梯度,还需要保存矩阵 $P \in \mathbb{R}^{N \times N}$。
2.3 FlashAttention
2.3.1 前向传播
FlashAttention 使用经典的 tiling 技术来减少内存 IO 操作,FlashAttention 实现步骤:
- 将输入块从 HBM 加载到 SRAM,
- 针对该块计算注意力,
- 更新输出而无需将大型中间矩阵 S 和 P 写入 HBM。
由于 softmax 会耦合整个行或行块,在线 softmax [11, 13] 可以将注意力计算划分为多个块,并重新缩放每个块的输出,最终得到正确结果(无近似)。通过显著减少内存的读写操作,FlashAttention 相比优化后的基准注意力实现提升了 2-4 倍的运行时间。
这里介绍下在线 softmax 技术 [11] 以及它在注意力机制中的应用 [13]。为了简单起见,假设只考虑注意力矩阵 $S$ 的一个行块,形式为 $[S^{(1)}\quad S^{(2)}]$,其中矩阵 $S^{(1)}, S^{(2)} \in R^{B_r\times B_c}$,$B_r$ 和 $B_c$ 分别是行块和列块的大小。目标是对这个行块进行 softmax 计算并与 $V = [V^{(1)}\quad V^{(2)}]$ 矩阵相乘,其中矩阵 $V^{(1)}, V^{(2)} \in R^{B_c \times d}$。标准的 softmax 计算方式是:
\[m = \max(\text{rowmax}(S^{(1)}), \text{rowmax}(S^{(2)})) \in \mathbb{R}^{B_r}, \quad \ell = \text{rowsum}(e^{S^{(1)} - m}) + \text{rowsum}(e^{S^{(2)} - m}) \in \mathbb{R}^{B_r}\] \[\mathbf{P} = [\mathbf{P}^{(1)} \; \mathbf{P}^{(2)}] = \text{diag}(\ell)^{-1} \left[ e^{S^{(1)} - m} \; e^{S^{(2)} - m} \right] \in \mathbb{R}^{B_r \times 2B_c}\] \[\mathbf{O} = [\mathbf{P}^{(1)} \; \mathbf{P}^{(2)}] \begin{bmatrix} \mathbf{V}^{(1)} \\ \mathbf{V}^{(2)} \end{bmatrix} = \text{diag}(\ell)^{-1} e^{S^{(1)} - m} \mathbf{V}^{(1)} + e^{S^{(2)} - m} \mathbf{V}^{(2)} \in \mathbb{R}^{B_r \times d}\]在线 softmax 会针对每个块计算“局部” softmax,并在最后通过重缩放得到正确的输出:
\[\begin{aligned} m^{(1)} &= \text{rowmax}(S^{(1)}) \in \mathbb{R}^{B_r}, \quad \ell^{(1)} = \text{rowsum}(e^{S^{(1)} - m^{(1)}}) \in \mathbb{R}^{B_r} \\ \tilde{P}^{(1)} &= \text{diag}(\ell^{(1)})^{-1} e^{S^{(1)} - m^{(1)}} \in \mathbb{R}^{B_r \times B_c} \\ \mathbf{O}^{(1)} &= \tilde{P}^{(1)} \mathbf{V}^{(1)} = \text{diag}(\ell^{(1)})^{-1} e^{S^{(1)} - m^{(1)}} \mathbf{V}^{(1)} \in \mathbb{R}^{B_r \times d} \\ m^{(2)} &= \max(m^{(1)}, \text{rowmax}(S^{(2)})) = m \\ \ell^{(2)} &= e^{m^{(1)} - m^{(2)}} \ell^{(1)} + \text{rowsum}(e^{S^{(2)} - m^{(2)}}) = \text{rowsum}(e^{S^{(1)} - m}) + \text{rowsum}(e^{S^{(2)} - m}) = \ell \\ \tilde{P}^{(2)} &= \text{diag}(\ell^{(2)})^{-1} e^{S^{(2)} - m^{(2)}} \in \mathbb{R}^{B_r \times B_c} \\ \mathbf{O}^{(2)} &= \text{diag}\left(\frac{\ell^{(2)}}{\ell^{(1)}}\right) \mathbf{O}^{(1)} + \tilde{P}^{(2)} \mathbf{V}^{(2)} = \text{diag}(\ell^{(2)})^{-1} e^{S^{(1)} - m} \mathbf{V}^{(1)} + \text{diag}(\ell^{(2)})^{-1} e^{S^{(2)} - m} \mathbf{V}^{(2)} = \mathbf{O}. \end{aligned}\]下图展示 FlashAttention 如何使用在线 softmax 实现分块处理(见图 1),从而减少内存的读写操作。
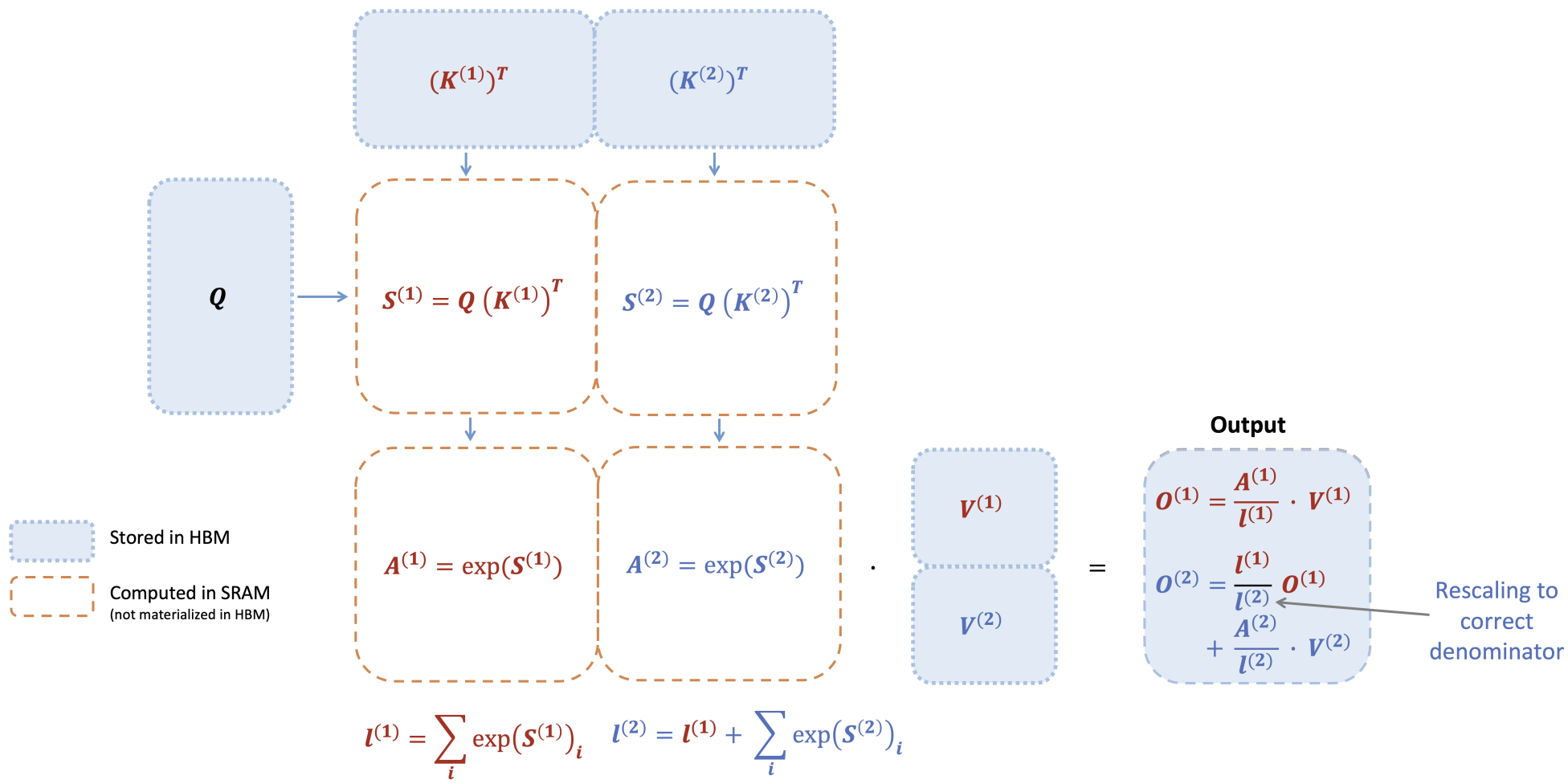
当键 K 被划分为两个块、值 V 也被划分为两个块时,FlashAttention 的前向传播执行过程的示意图。通过对每个块计算注意力并重新缩放输出,最终可以得到正确的结果,同时避免了对中间矩阵 S 和 P 的昂贵内存读写。为了简化说明,图中省略了 softmax 过程中每个元素减去行最大值的步骤。
2.3.2 反向传播
在反向传播中,当输入 $Q、K、V$ 的块被加载到 SRAM 后,通过重新计算注意力矩阵 $S$ 和 $P$ 的值,FlashAttention 避免了存储大量中间值。由于不需要保存大小为 $N\times N$ 的大矩阵 S 和 P,FlashAttention 根据序列长度节省了 10-20 倍的内存(所需内存量与序列长度 $N$ 呈线性增长,而不是二次增长)。由于减少了内存读写,反向传播还实现了 2-4 倍的实际运行时间加速。
反向传播对第 2.2 节中的公式进行了分块处理。虽然从概念上来说,反向传播比前向传播更简单(没有 softmax 的重新缩放 no softmax rescaling),但其实现却更加复杂。因为与前向传播只需要执行 2 次矩阵乘法不同,反向传播需要在 SRAM 中保留更多数据,以执行 5 次矩阵乘法。
3. FlashAttention-2: 算法, 并行性与工作分配
3.1 算法
对 FlashAttention 的算法进行了调整,以减少非矩阵乘法的 FLOPs 数量,因为从硬件角度看,非矩阵乘法计算速度远远低于矩阵乘法。以 A100 GPU 为例,其 FP16/BF16 矩阵乘法的理论最大吞吐量为 312 TFLOPs/s,而非矩阵乘法的 FP32 吞吐量仅为 19.5 TFLOPs/s,即非矩阵乘法 FLOP 的计算成本是矩阵乘法 FLOP 的 16 倍。
3.1.1 前向传播
重新审视第 2.3 节中展示的在线 softmax 技巧,并进行了两项细微调整以减少非矩阵乘法的 FLOPs:
- 我们不需要通过 $\text{diag}(\ell^{(2)})^{-1}$ 来重新缩放输出更新的两项: \(\mathbf{O}^{(2)} = \text{diag}\left(\frac{\ell^{(1)}}{\ell^{(2)}}\right)^{-1} \mathbf{O}^{(1)} + \text{diag}(\ell^{(2)})^{-1} e^{S^{(2)} - m^{(2)}} \mathbf{V}^{(2)}.\)
我们可以保留 $\tilde{\mathbf{O}}^{(2)}$ 的 “未缩放” 版本,并保留统计量 $\ell^{(2)}$: \(\tilde{\mathbf{O}}^{(2)} = \text{diag}(\ell^{(1)})^{-1} \tilde{\mathbf{O}}^{(1)} + e^{S^{(2)} - m^{(2)}} \mathbf{V}^{(2)}.\)
只在循环结束时将最终的 $\tilde{\mathbf{O}}^{(\text{last})}$ 通过 $\text{diag}(\ell^{(\text{last})})^{-1}$ 进行缩放,以得到正确的输出。
- 我们不需要保存每一块的最大值 $m^{(j)}$ 和指数和 $\ell^{(j)}$ 用于反向传播。我们只需要存储 $\log \text{sumexp}$,即 $L^{(j)} = m^{(j)} + \log(\ell^{(j)})$。
和第 2.3 节只处理 2 个块的简单场景,在线 softmax 技巧现在变为:
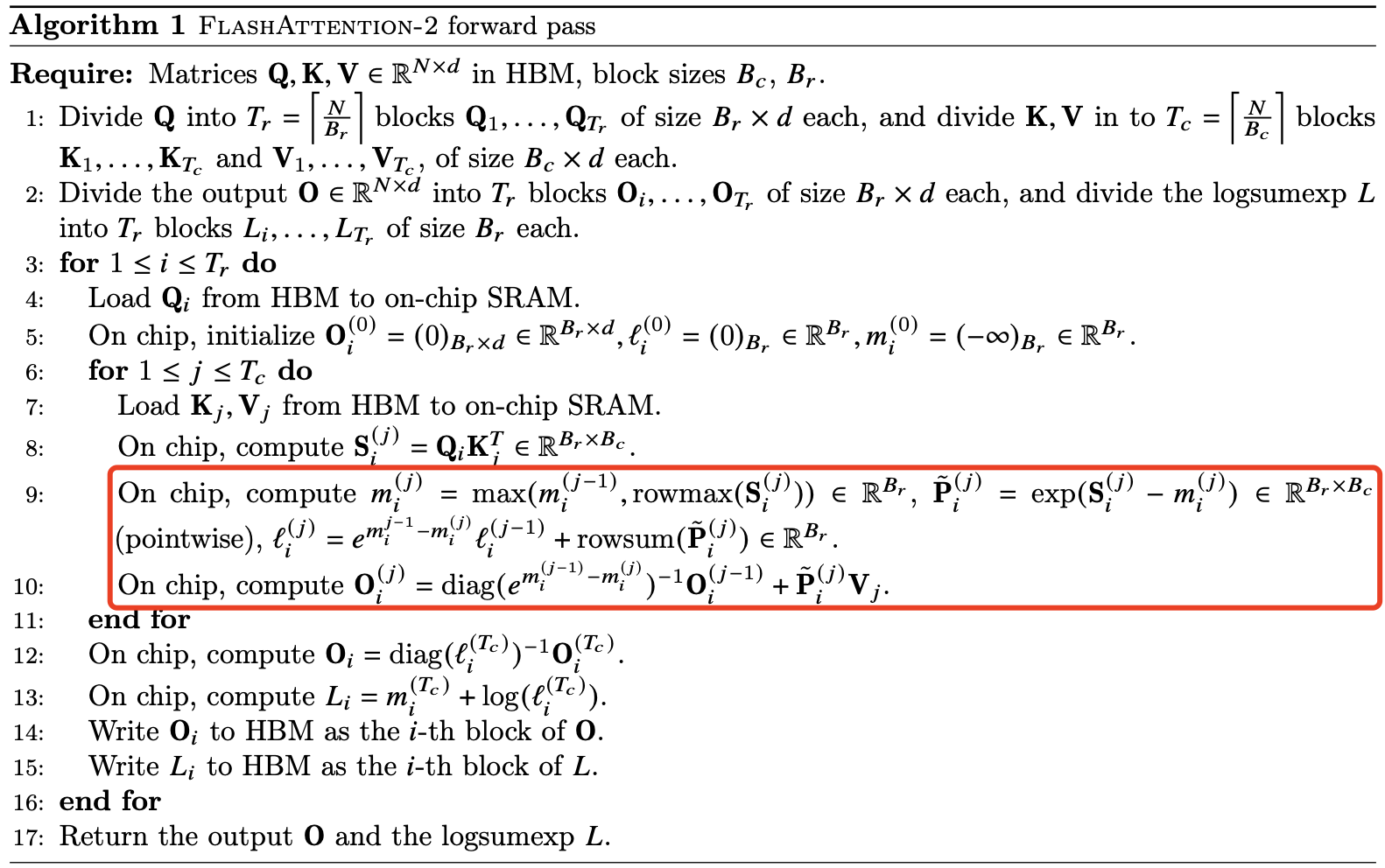
\[\begin{aligned} m^{(1)} &= \text{rowmax}(S^{(1)}) \in \mathbb{R}^{B_r} \\ \ell^{(1)} &= \text{rowsum}(e^{S^{(1)} - m^{(1)}}) \in \mathbb{R}^{B_r} \\ \mathbf{O}^{(1)} &= e^{S^{(1)} - m^{(1)}} \mathbf{V}^{(1)} \in \mathbb{R}^{B_r \times d} \\ m^{(2)} &= \max(m^{(1)}, \text{rowmax}(S^{(2)})) = m \\ \ell^{(2)} &= e^{m^{(1)} - m^{(2)}} \ell^{(1)} + \text{rowsum}(e^{S^{(2)} - m^{(2)}}) = \text{rowsum}(e^{S^{(1)} - m}) + \text{rowsum}(e^{S^{(2)} - m}) = \ell \\ \tilde{\mathbf{P}}^{(2)} &= \text{diag}(\ell^{(2)})^{-1} e^{S^{(2)} - m^{(2)}} \\ \tilde{\mathbf{O}}^{(2)} &= \text{diag}(e^{m^{(1)} - m^{(2)}}) \tilde{\mathbf{O}}^{(1)} + e^{S^{(2)} - m^{(2)}} \mathbf{V}^{(2)} \\ \mathbf{O}^{(2)} &= \text{diag}(\ell^{(2)})^{-1} \tilde{\mathbf{O}}^{(2)} = 0 \end{aligned}\]FlashAttention-2 算法前向传播过程的完整流程在算法 1 中描述。
FlashAttention-2 的另一种 python 实现如下所示,代码参考这里,其中 attention 输出 $O_j$ 的更新和论文有些不同,仅供参考参考学习。
# m, d, m0, d0, o0, m1, d1, o1):
def flashattn_2_update(m, m0, od0, m1, d1, od1):
# | | | | |
# | | x v 1
# Init value: MIN_M 0
od = od0 * np.exp(m0 - m) + od1 * np.exp(m1 - m) * d1
return od
def block_flashattn2(Q, K, V, block_size=32):
N, Dim = Q.shape
# 1, Load Q K and write S. and Compute S[r][i] by matrix multiply
S = np.zeros([N, N], "float32")
O = np.zeros([N, Dim], "float32")
for r in range(0, N):
for i in range(0, N):
# QK^T
for j in range(0, Dim):
S[r][i] += Q[r][j] * K[i][j]
for r in range(0, N):
# Softmax
mm = np.zeros([N], "float32")
dd = np.zeros([N], "float32")
m = np.zeros([N // block_size], "float32")
d = np.zeros([N // block_size], "float32")
for b in range(0, N // block_size):
# Calculate m,d of single block
for i in range(0, block_size):
mm[b*block_size + i], dd[b*block_size + i] = online_softmax_update(
mm[b*block_size + i-1] if i > 0 else MIN_M,
dd[b*block_size + i-1] if j > 0 else 0,
S[r, b*block_size + i],
1,
)
# Merge all block's result to total
m[b], d[b] = online_softmax_update(
m[b-1] if b > 0 else MIN_M,
d[b-1] if b > 0 else 0,
mm[(b + 1) * block_size - 1], # 当前块的 mm 和 dd
dd[(b + 1) * block_size - 1])
# PV: [N, N] * [N, Dim] -> [N, dim]
for c in range(0, Dim):
o = 0
for b in range(0, N //block_size):
# Calculate single block
od = 0
for i in range(0, block_size):
od = flashattn_2_update(
mm[b * block_size + i], # 当前迭代位置的 m
mm[b * block_size + i-1] if i > 0 else MIN_M,
od,
S[r, b * block_size + i], # 当前迭代位置的 s[r,i]
V[b * block_size + i, c],
1
)
# Merge all blocks to total
o = flashattn_2_update(
m[b], # 当前迭代 block 的 m
m[b - 1] if b > 0 else MIN_M,
o, # 上一个 block 的结果
mm[(b + 1) * block_size - 1], # m1
dd[(b + 1) * block_size - 1], # d1
od / dd[(b + 1) * block_size - 1], # od1
)
O[r][c] = o / d[b - 1] # 上一轮 block 的 d
return O
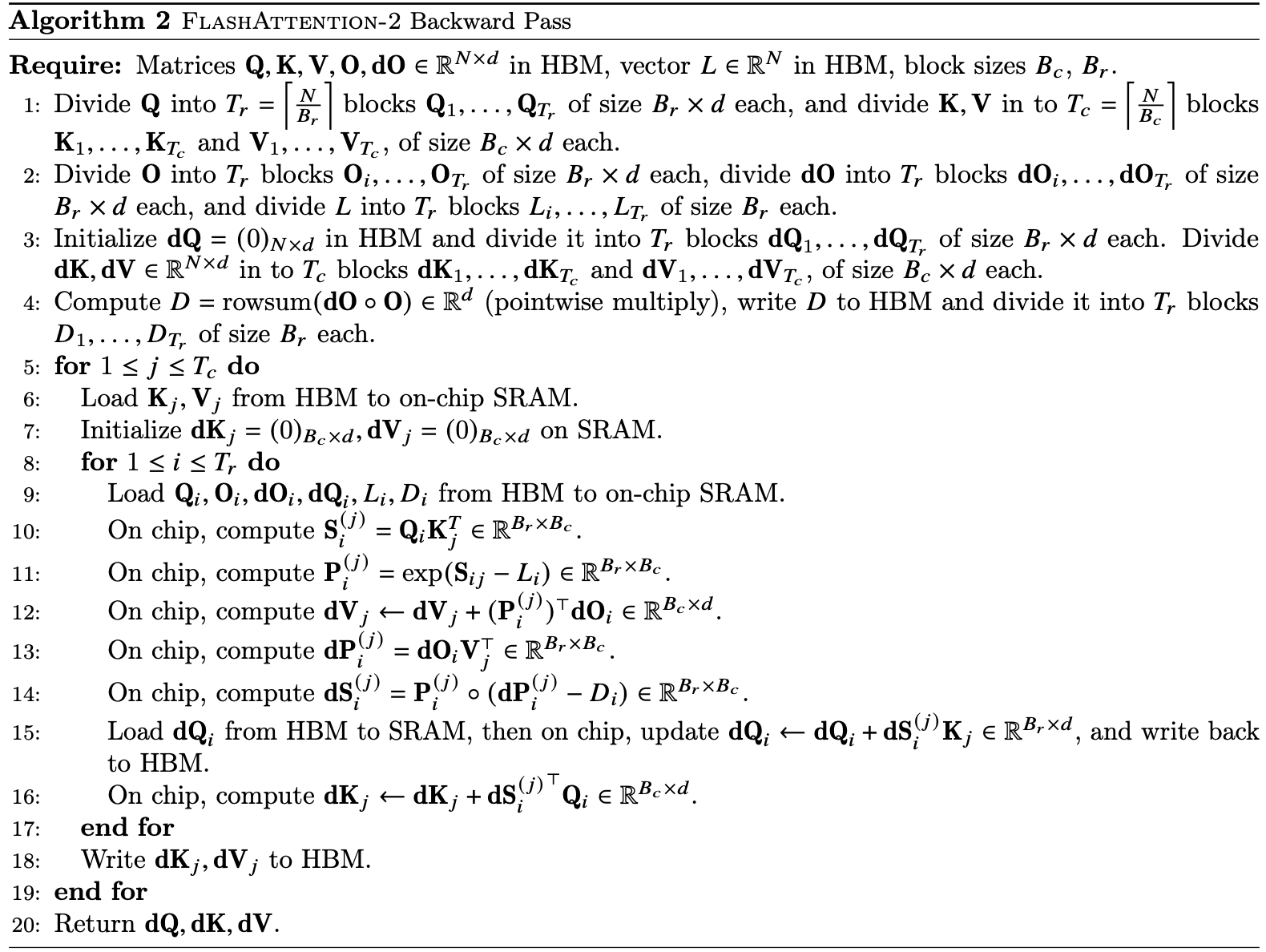
3.1.2 反向传播
FlashAttention-2 的反向传播与 FlashAttention 基本相同。只做了一个小改动,softmax 中仅使用按行的 logsumexp $L$,而不是同时使用按行最大值和按行指数和。反向传播过程的详细步骤在算法 2 中描述。
多查询注意力(MQA)和分组查询注意力(GQA)。多查询注意力(MQA)[15] 和分组查询注意力(GQA)[1] 是注意力机制的变体,在这些变体中,多个查询头共享同一个键和值的头,从而减少推理过程中 KV 缓存的大小。与其为计算复制键和值的头,不如通过隐式操作头部索引来完成相同的计算。在反向传播中,我们需要将那些隐式复制的不同头的 dK 和 dV 梯度相加。
3.2 并行化
FlashAttention 的第一个版本通过批次大小和头的数量进行并行处理。每个注意力头对应一个线程块,整体上会有批次大小 × 头数量的线程块。每个线程块被安排在流式多处理器(SM)上执行,例如在 A100 GPU 上有 108 个这样的 SM。当线程块数量较多时(例如 ≥ 80),这种调度可以高效地利用 GPU 上的计算资源。
在处理长序列时(通常意味着较小的批次或头的数量),为了更好地利用 GPU 的多处理器,我们增加了在序列长度维度上的并行化。这对长序列任务带来了显著的加速。
前向传播。我们可以看到外层循环(在序列长度上的循环)是完全并行的,我们将它们调度到不同的线程块上,这些线程块之间不需要通信。我们还像 FlashAttention 中那样在批量维度和头的数量维度上并行化。序列长度上的并行化提高了占用率(GPU 资源的使用率),当批量大小和头的数量较小时,这种并行化带来了加速。
将循环的顺序交换(外层循环在行块上,内层循环在列块上,与原始 FlashAttention 论文中相反的顺序),和在序列长度维度上并行化的想法,最早由 Phil Tillet 在 Triton [17] 实现中提出和实现。
反向传播中,唯一需要在不同列块之间共享计算的部分是更新 $dQ$ 的过程(见算法 2)。我们需要从 HBM 中加载 $dQ_i$ 到 SRAM,在片上更新 $dQ_i ← dQ_i + dS^{(j)}_i K_j$,并将其写回 HBM。因此,我们也在序列长度维度上并行化,并为每个反向传播的列块分配一个线程块。使用原子加法来协调不同线程块之间的 $dQ$ 更新。
图 2 中描述了这种并行化方案。
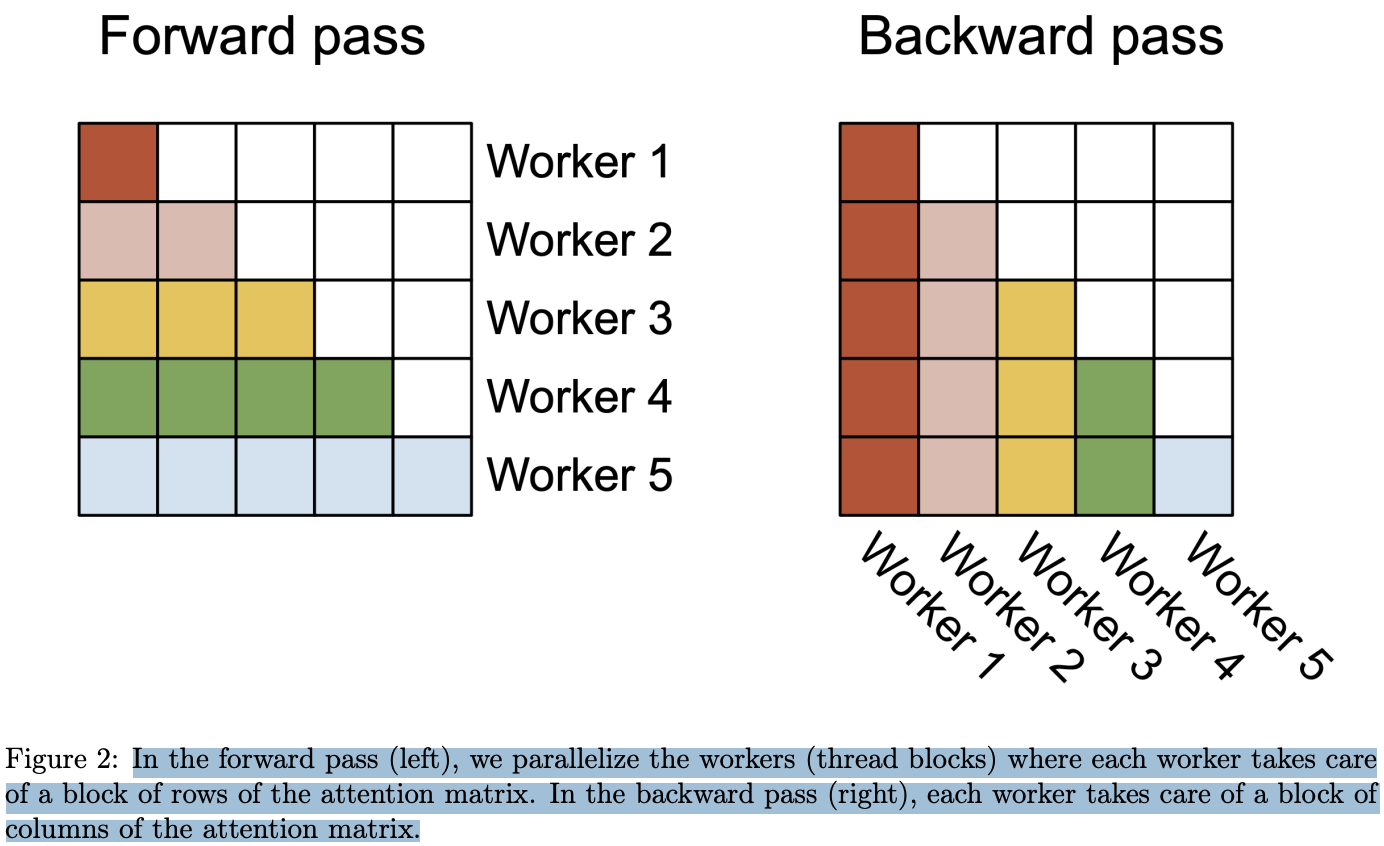
在前向传播过程中(左侧),我们并行化了工作线程(线程块),每个线程处理注意力矩阵的一部分行。在反向传播过程中(右侧),每个线程负责处理注意力矩阵的一部分列。
3.3 不同 warp 之间的任务划分
3.2 节介绍了如何调度线程块,但即使在每个线程块内部,我们仍然需要决定如何在不同的 warps 之间划分任务。通常情况下,每个线程块会使用 $4$ 或 $8$ 个 warp,任务划分如图 3 所示。
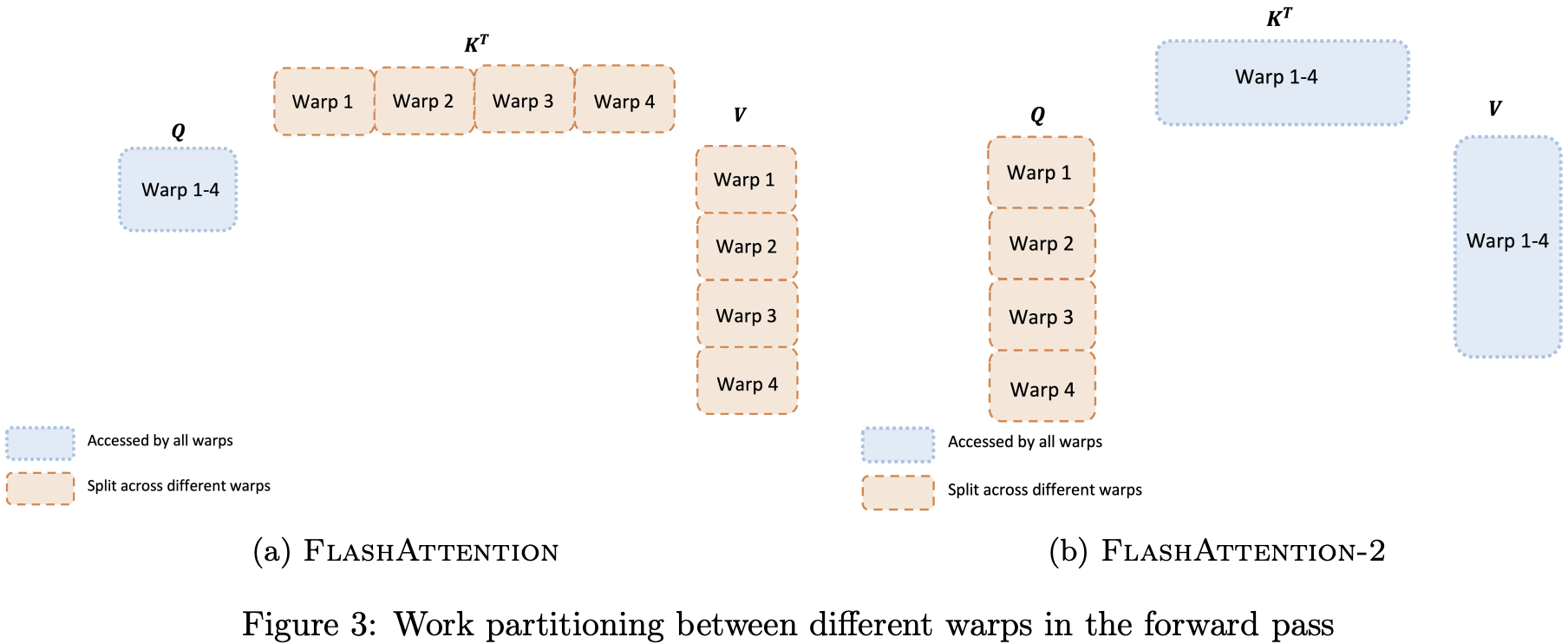
前向传播。在每个块中,FlashAttention 将 K 和 V 分配给 4 个 warps,同时保持 Q 对所有 warps 都可访问。每个 warp 计算 $QK^T$ 的一部分,随后需要与 V 的一部分相乘,并通过通信汇总结果。这种方案被称为 “split-K” 方案。然而,这种方式效率不高,因为所有 warp 都需要将中间结果写入共享内存,进行同步后再汇总,这些共享内存的读写操作拖慢了前向传播的速度。
FlashAttention-2 优化这一点,改为将 Q 分配给 4 个 warp,同时保持 K 和 V 对所有 warps 可访问。每个 warp 在计算 $QK^T 的一部分后,直接与 $V$ 的共享部分相乘,得到最终输出。这样无需 warps 之间的通信,大大减少了共享内存的读写操作,从而提升了速度(见第 4 节)
反向传播。将 warps 分区以避免“split-K”方案。不过,由于 $Q、K、V、O、dO、dQ、dK、dV$ 等输入和梯度之间的复杂依赖关系,仍然需要一定的同步操作。尽管如此,避免“split-K”方案可以减少共享内存的读写操作,从而带来加速效果(详见第 4 节)。
调整块大小。增大块大小通常可以减少共享内存的加载和存储操作,但也会增加所需寄存器的数量以及共享内存的总使用量。一旦块大小超过一定阈值,寄存器溢出会导致显著的性能下降,或者所需的共享内存量超过 GPU 的可用空间,导致内核无法执行。通常我们根据头维度 $d$ 和设备的共享内存大小,选择 {64, 128} × {64, 128} 大小的块。
我们针对每个头维度手动调优块大小,因为基本上只有 4 种块大小可供选择。但这个过程可以通过自动调优来避免手动调节的麻烦,作者未来将对块大小自动调优进行探索。
4. 实验验证
分为两个部分,attention 模块的基准测试和端到端的性能。表2 是无 flashattention、使用flashattention-v1 和 flashattention-2 在训练 GPT3 模型上的可实现计算性能($\text{Attainable GFlops/s}$)的对比。

5. 讨论与未来方向
FlashAttention-2 比 FlashAttention 快 2 倍,这意味着我们可以用训练 8k 上下文模型的成本来训练 16k 上下文的模型。我们对这项技术应用于理解长篇书籍和报告、高分辨率图像、音频和视频的潜力感到非常期待。FlashAttention-2 还将显著加速现有模型的训练、微调和推理。
作为下一步,作者计划进一步优化 FlashAttention-2,以充分利用 H100 GPU 的新硬件特性(如 TMA、第四代 Tensor Cores、fp8)。通过将 FlashAttention-2 的低级优化与高级算法变化(如局部注意力、扩展注意力、块稀疏注意力)结合,我们有望训练具有更长上下文的 AI 模型。此外,我们也期待与编译器研究人员合作,使这些优化技术更易于编程。