DeepSeekV2 论文解读
Categories: Transformer
1. 介绍
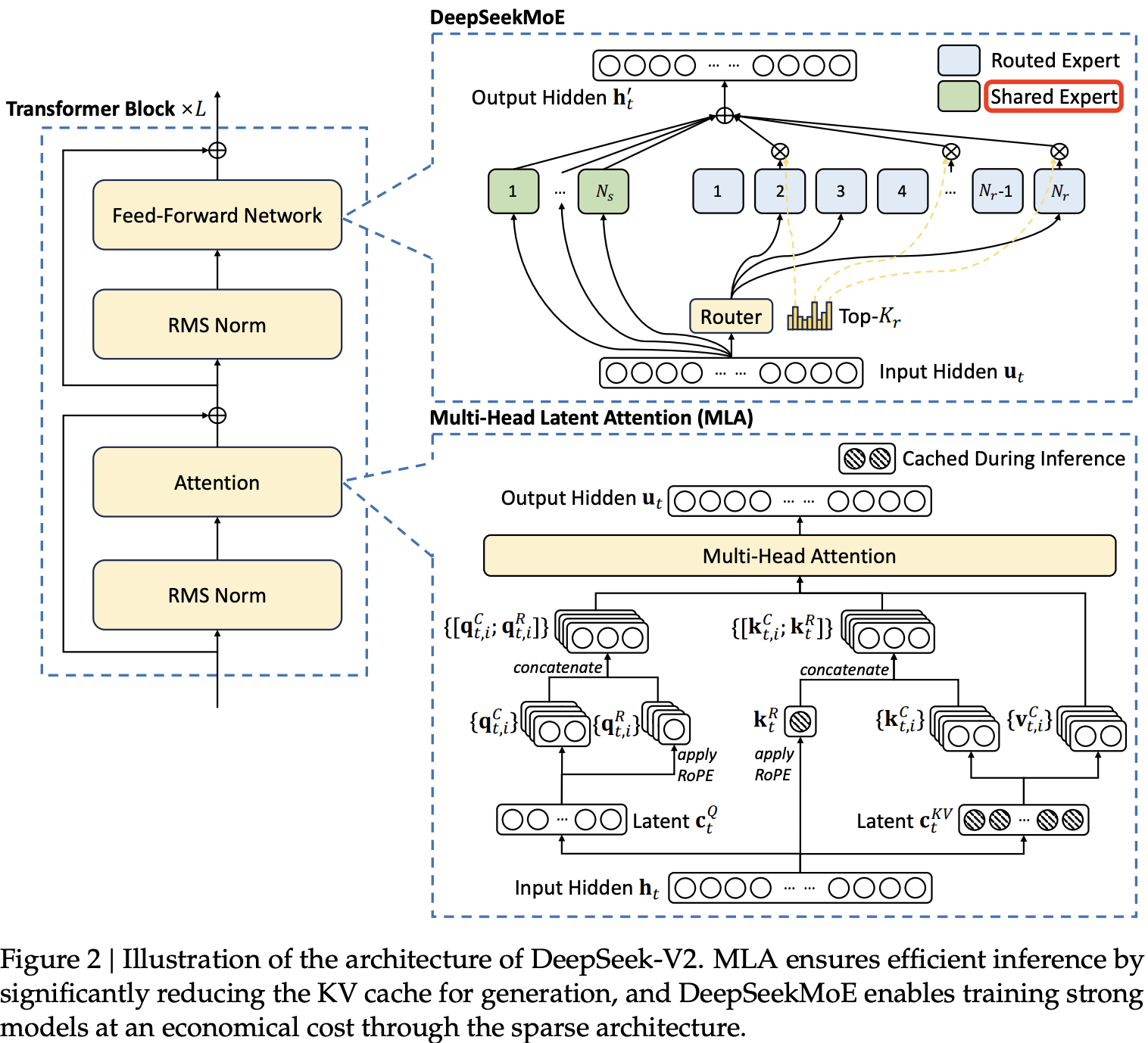
DeepSeek-V2 是一种高效的开源混合专家(MoE)语言模型,基于创新的 Transformer 架构,实现了经济的训练和高效的推理。DeepSeek-V2 具有 2360 亿个参数(236B),每个 token 激活 21 亿个参数,支持 128K tokens 的上下文长度。
和 DeepSeekV1 模型结构沿用 llama 结构不同,DeepSeekV2 提出了多头潜在注意力(MLA)和 DeepSeekMoE,旨在优化 Transformer 框架中的注意力模块和前馈网络(FFNs)。
MLA: Multi-head Latent Attention 结构,通过低秩键值联合压缩,减少了推理时的 KV 缓存,从而提高了推理效率。DeepSeekMoE:FFN(标准MOE) 的优化版。- 细粒度专家划分(Routed Expert):相比标准 MOE,DeepSeekMoE 在保持参数量不变的前提下,通过减小每个 Expert 的
FFN维度,来增加 Expert 数量,进行更细粒度专家划分。 - 共享专家隔离(Shared Expert): 用于表示 Routed Expert 中的共用知识信息,减少 Routed Expert 的知识冗余问题。
- 细粒度专家划分(Routed Expert):相比标准 MOE,DeepSeekMoE 在保持参数量不变的前提下,通过减小每个 Expert 的
DeepSeek-V2 架构图如下所示:
2. 架构
本节介绍 MLA 和 DeepSeekMoE 的详细设计。
2.1 多头潜变量注意力(MLA):提升推理效率
传统的 Transformer 模型通常采用多头注意力(MHA),但在生成(generation)过程中,其庞大的 Key-Value(KV)缓存会成为限制推理效率的瓶颈。为减少 KV 缓存占用,研究者提出了多查询注意力(MQA)(Shazeer, 2019)和分组查询注意力(GQA)(Ainslie et al., 2023)。这两种方法虽然减少了 KV 缓存需求,但在性能上仍无法与 MHA 相媲美(关于 MHA、GQA 和 MQA 的消融实验见附录 D.1)。
DeepSeek-V2 引入了一种全新的注意力机制多头潜变量注意力(MLA)。MLA 结合了低秩键值联合压缩(low-rank key-value joint compression,),在推理时大幅降低 KV 缓存需求,同时在性能上超越 MHA。
MLA 本质上是通过低秩转换的思路减少 head 的维度,即换为一个压缩的 QKV,存储的KV 的维度显著减小,而不是 GQA 方法减少 kv heads 的数量。
2.1.1 Standard Multi-Head Attention
先回顾下标准的多头注意力(MHA)机制。设 $d$ 为嵌入维度,$n_h$ 为注意力头数,$d_h$ 为单个注意力头的维度,$h_t \in R_d$ 表示第 $t$ 个 token 进入注意力层的输入向量。
在 MHA 机制中,我们通过三个投影矩阵 $W_Q、W_K、W_V \in \mathbb{R}^{n_h d_h\times d}$ 分别计算得到查询向量、键向量和值向量($q_t、k_t、v_t \in \mathbb{R}^{n_h d_h}$),QKV 向量的线性变换公式如下所示:
\[\mathbf{q}_t = W^Q \mathbf{h}_t, \tag{1}\] \[\mathbf{k}_t = W^K \mathbf{h}_t, \tag{2}\] \[\mathbf{v}_t = W^V \mathbf{h}_t, \tag{3}\]QKV 的线性变换的权重矩阵的第二个维度大小一定为嵌入维度 $d$。
然后,$q_t$, $k_t$, $v_t$ 将被切分为 $n_h$ 个头(heads),用于多头注意力计算:
其中,$q_{t,i}$, $k_{t,i}$, $v_{t,i} \in \mathbb{R}^{d_h}$ 分别表示第 $i$ 个注意力头的查询(query)、键(key)和值(value);$W_O \in \mathbb{R}^{d \times d_h n_h}$ 表示输出投影矩阵。在推理过程中,key 和 value 需要被缓存,以加速计算,避免重复计算。
标准 MHA 每个 token 的 kv 缓冲大小 = $2n_hd_h l$,单位为字节 byte;如果使用了 GQA 优化技术,每个 token 的 kv 缓冲大小变为 $2n_{kv}d_h l = 2n_hd_h l/\text{groups}$ 个元素。下标 $t$ 表示第几个 token,下标 $[1, n_h]$ 表示注意力头数,$l$ 表示 decoder layers 数目。
在模型部署时,这种庞大的 KV 缓存 成为了一个主要的瓶颈,限制了最大批量大小(batch size)和序列长度(sequence length)。
2.1.2 Low-Rank Key-Value Joint Compression
MLA 的核心是对键(keys)和值(values)进行低秩联合压缩(low-rank joint compression),以减少 KV 缓存(KV cache)的占用:
\[\mathbf{c}_t^{KV} = W^{DKV} \mathbf{h}_t, \tag{9}\] \[\mathbf{k}_t^{C} = W^{UK} \mathbf{c}_t^{KV}, \tag{10}\] \[\mathbf{v}_t^{C} = W^{UV} \mathbf{c}_t^{KV}, \tag{11}\]KV 向量的生成是先投影到一个低维(5120 -> 512)的 compressed_kv 向量($\mathbf{c}_t^{KV}$)再升维展开得到 $\mathbf{k}_t^{C}$ 和 $\mathbf{v}_t^{C}$。上述公式的各个变量定义:
- $\mathbf{c}_t^{KV}$ 是
keys和values的压缩后的潜在向量(latent vector); - $d_c (\ll d_h n_h)$ 代表
KV压缩维度(KV compression dimension) - $W^{DKV} \in \mathbb{R}^{d_c \times d}$ 是降维投影矩阵(down-projection matrix);
- $W^{UK}, W^{UV} \in \mathbb{R}^{d_h n_h \times d_c}$ 分别是 keys 和 values 的升维投影矩阵(up-projection matrices)。
另外,虽然不能减少 KV Cache 的占用,但是为了减少训练时的激活内存(activation memory),同样也对查询(queries)也进行了低秩压缩(low-rank compression)。同样也是先投影到一个低维(5120 -> 1536)的 compressed_kv 向量($\mathbf{c}_t^{Q}$)再升维展开得到 $\mathbf{q}_t^{C}$:
类比前面的公式可知:
- $\mathbf{c}_t^{Q} \in \mathbb{R}^{d’_c}$ 是查询的压缩潜在向量(compressed latent vector for queries);
- $d’_c (\ll d_h n_h)$ 表示查询的压缩维度(query compression dimension);
- $W^{DQ} \in \mathbb{R}^{d’_c \times d}$ 是查询的降维投影矩阵;
- $W^{UQ} \in \mathbb{R}^{d_h n_h \times d’_c}$ 是查询的升维投影矩阵(up-projection matrix)。
2.1.3 Decoupled Rotary Position Embedding
和 DeepSeek 67B(DeepSeek-AI, 2024)类似,作者也计划在 DeepSeek-V2 中使用 旋转位置编码(RoPE, Rotary Position Embedding)(Su et al., 2024)。但是,RoPE 与低秩 KV 压缩(low-rank KV compression)并不兼容。
具体来说,RoPE 使键(Key)和查询(Query)都具备位置敏感性(position sensitivity)。如果我们在压缩后的键 $\mathbf{k}_t^{C}$ 上应用 ROPE,那么实际上我们得到的键表示会是这样的形式:
\[k_t^R = \text{ROPE}(W^{UK} \mathbf{c}_t^{KV})\]很明显式(10)中的 $W^{UK}$ 和 RoPE 旋转矩阵在计算过程中“耦合”在一起—这意味着 $W^{UK}$ 输出的结果会始终被那个依赖于具体位置的旋转矩阵所“修正”或“调制”。
这样会导致在执行 atten weight($QK^T$)的计算优化中,无法像原本设想的那样,把 $W^{UK}$ 吸收到 $W^Q$ 中,因为 当前生成 token 相关的 RoPE 矩阵位于 $W^Q$ 和 $W^{UK}$ 之间,而矩阵乘法不满足交换律(commutative law)。这直接导致在推理过程中,我们必须重新计算所有 prefix token 的键(keys),这将显著降低推理效率。
为了解决这个问题,作者提出了一种解耦 RoPE(decoupled RoPE)的策略,通过额外引入多头查询(multi-head queries)$q_{t,i}^R \in \mathbb{R}^{d^R_h}$和采用一个共享键(shared key) $k_t^R \in \mathbb{R}^{d^R_h}$ 来承载 RoPE 信息。其中 $d^R_h$ 代表解耦查询和键的每头维度(per-head dimension of the decoupled queries and key)。
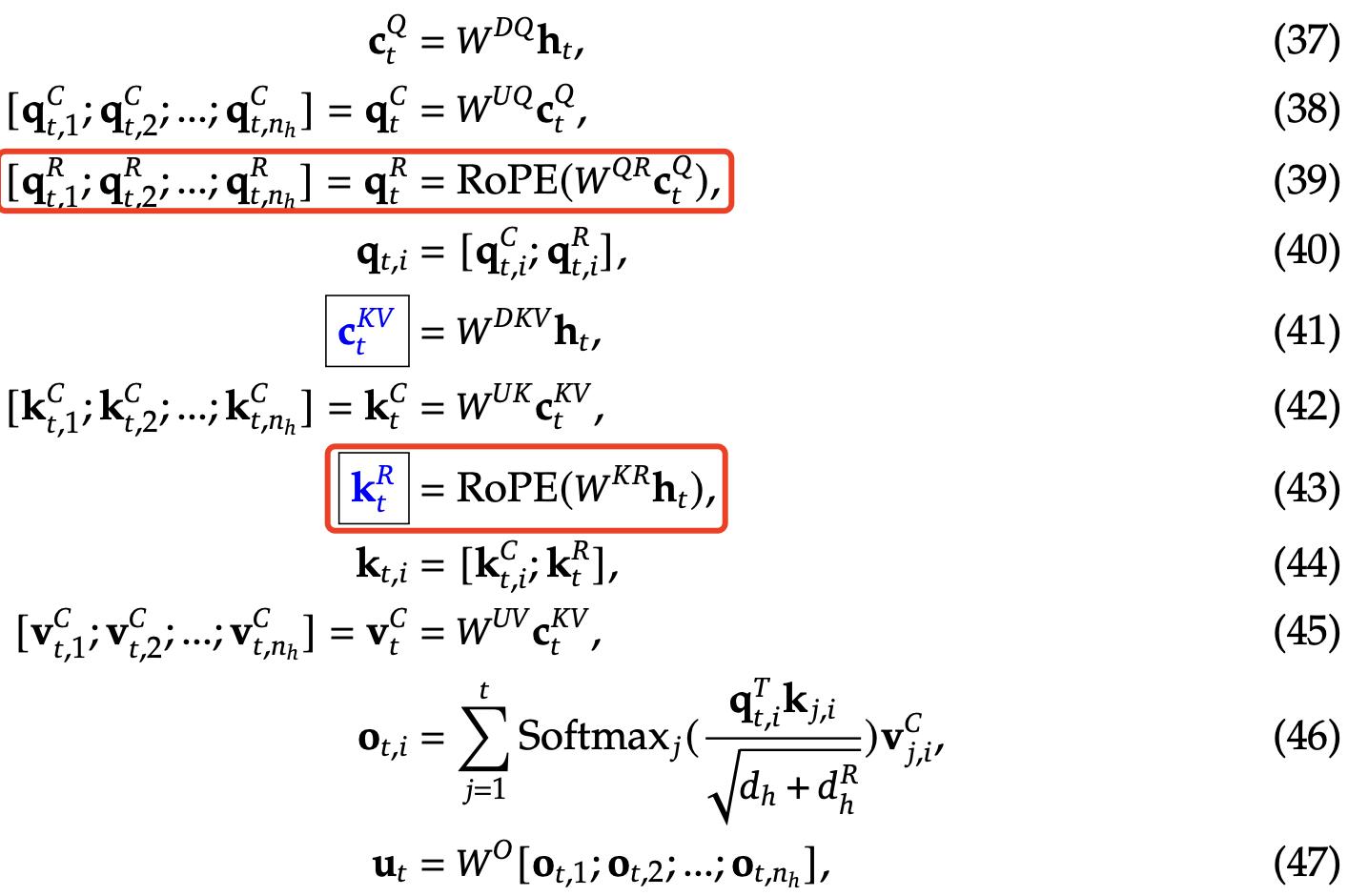
在使用解耦 RoPE 策略后,MLA 的计算过程变成如下所示:
其中:
- $W^{QR} \in \mathbb{R}^{d^R_h n_h \times d’_c}$ 表示生成解耦查询(decoupled queries)矩阵
- $W^{KR} \in \mathbb{R}^{d^R_h \times d}$ 表示解耦键(decoupled key)的矩阵。
- $\text{RoPE}(\cdot)$ 表示应用 RoPE 矩阵的操作;
- $\cdot ; \cdot$ 表示拼接(concatenation)操作。
在推理过程中,解耦后的键(decoupled key)也需要缓存。因此,DeepSeek-V2 的 KV 缓存总大小为 $(d_c + d^R_h)l$ 个元素。
很明显和前面公式相比,多了 $\mathbf{q}_t^{R}$ 和 $\mathbf{k}_t^{R}$ 两个变量的计算过程,它们用于单独承载 ROPE 信息,并和前面计算得到的 $\mathbf{q}_t^{C}$ 和 $\mathbf{k}_t^{C}$ 做拼接后得到新的 $q、k$,再执行 atten weight 计算($qk^t$)。
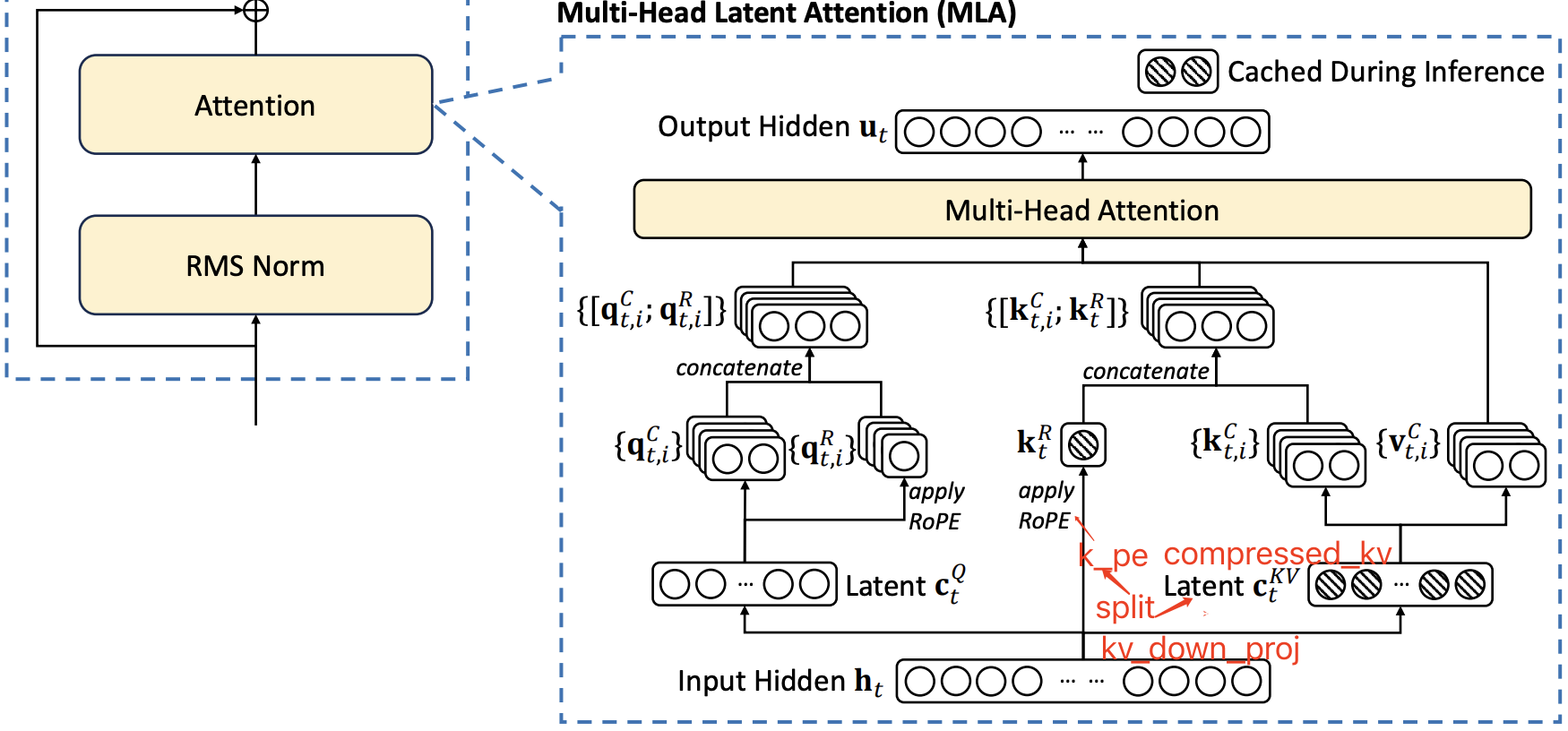
最后,总结下完成的 MLA 计算过程如下所示:
MLA 结构的可视化图如下所示:
2.1.4 kv cache 大小的比较
多头注意力(MHA)、分组查询注意力(GQA)、多查询注意力(MQA)和多头潜在注意力(MLA)的简化示意图对比如下图 3 所示。通过将键(Key)和值(Value)压缩到一个潜在向量中,MLA 在推理时大幅减少了对 KV 缓存的需求。
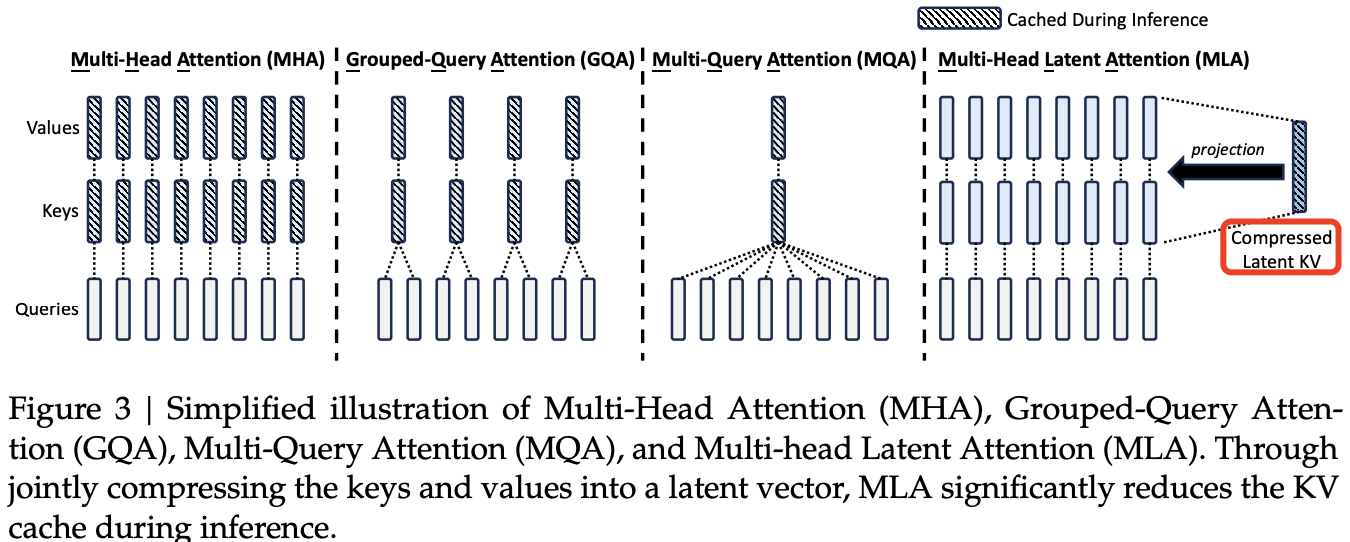
下表 1 中对比了不同注意力机制下,每个 token 需要的 KV 缓存大小。MLA 仅需要少量的 KV 缓存,其大小相当于仅有 $2.25$ 组(groups)的 GQA,但其性能却强于 MHA。
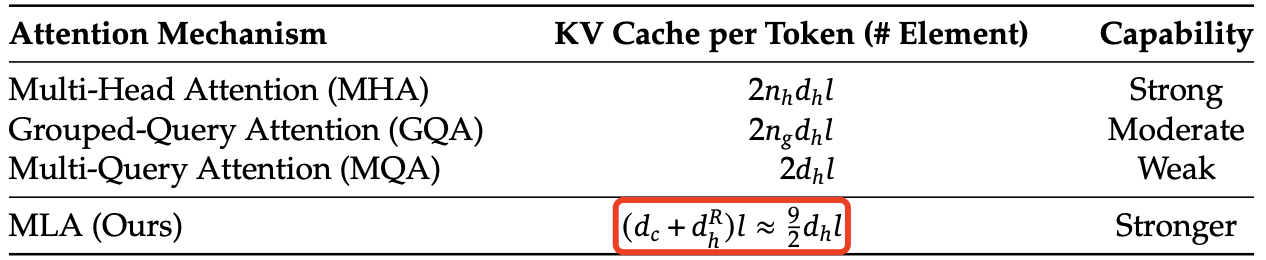
表 1|不同注意力机制下,每个 token 需要的 KV 缓存对比。其中,
- $n_h$ 表示注意力头的数量,
- $d_h$ 表示每个注意力头的维度,
- $l$ 表示模型层数,
- $n_g$ 表示 GQA 的组数,
- $d_c$ 和 $d^R_h$ 分别表示 MLA 中的 KV 压缩维度和解耦查询与键的 per-head 维度。
KV 缓存的数量以元素(elements)个数计算,不考虑存储精度(storage precision)。对于 DeepSeek-V2,
- $d_c$ 设定为 $4d_h$。
- $d^R_h$ 设定为 $\frac{d_h}{2}$。
因此,DeepSeek-V2 只需要 相当于 GQA $2.25$ 组的 KV 缓存,但相比 MHA 仍能提供更强的性能。
2.1.5 总结
MLA 虽然增大了计算量,但 KV Cache 的减少也降低了显存和带宽的压力,且 llm 推理的 decode 阶段是受限于带宽瓶颈和显存瓶颈,因此 MLA 的引入理论上能明显提高 Generation 的速度。
2.2 DeepSeekMoE:以经济成本训练强大的模型
对于 FFN(前馈网络),我们采用 DeepSeekMoE 架构(Dai et al., 2024)。DeepSeekMoE 主要包含两个关键思想:
- 更精细地划分专家网络,提升每个专家的专业性,提高知识表达的准确度。
- 引入部分共享专家,减少不同专家间的知识冗余,从而提升计算效率。
相比传统的 MoE 架构(如 GShard,Lepikhin et al., 2021),DeepSeekMoE 在相同的专家参数量和激活参数量下,能显著提升模型性能。
设 $u_t$ 为第 $t$ 个 token 的 FFN 输入,其 FFN 输出 $h’_t$ 计算如下:
\[\mathbf{h}_t' = \mathbf{u}_t + \sum_{i=1}^{N_s} \text{FFN}_i^{(s)} (\mathbf{u}_t) + \sum_{i=1}^{N_r} g_{ij,t} \text{FFN}_i^{(r)} (\mathbf{u}_t), \tag{20}\] \[g_{ij,t} = \begin{cases} s_{ij,t}, & s_{ij,t} \in \text{Topk}(\{s_{ij,t}| 1 \leq j \leq N_r\}, K_r), \\ 0, & \text{otherwise}, \end{cases} \tag{21}\] \[s_{ij,t} = \text{Softmax}_i (\mathbf{u}_t^T e_i), \tag{22}\]上述公式中:
- $N_s$ 和 $N_r$ 分别表示共享专家和路由专家的数量;
- $FFN(s) i(·)$ 和 $FFN(r) 𝑖(·)$ 分别表示第 $i$ 个共享专家和第 $i$ 个路由专家的计算过程;
- $K_r$ 表示激活的路由专家数量;
- $g_{i, t}$ 是第 $i$ 个专家的门控值,用来决定该专家是否激活;
- $s_{i, t}$ 是 token 到专家的亲和度值,表示 token 和专家之间的相关性;
- $e_i$ 是该层第 $i$ 个路由专家的质心,用于表示专家的聚合特征;
- $\text{Topk}(·, K)$ 表示从第 $t$ 个 token 计算的所有路由专家的亲和度分数中,选择出 $K$ 个最高的值,并将这些分数组成一个集合。
2.2.2. 设备受限路由(Device-Limited Routing)
作者设计了一种设备受限的路由机制,用于限制 MoE 相关的通信成本。
当采用专家并行(expert parallelism)时,路由专家(routed experts)会分布在多个设备上。对于每个 token,它的 MoE 相关通信频率与其目标专家所涉及的设备数量成正比。由于 DeepSeekMoE 采用了精细的专家划分策略,激活的专家数量可能较多,如果直接应用专家并行,会导致更高的 MoE 相关通信成本。
在 DeepSeek-V2 中,除了直接选择得分最高的 $K$ 个路由专家(top-K selection) 之外,我们还确保每个 token 的目标专家最多分布在 $M$ 台设备上。具体而言,对于每个 token,我们首先选择拥有最高亲和度分数的 $M$ 台设备,然后在这 $M$ 台设备上的专家中执行 top-K 选择。实践中,我们发现当 $M \geq 3$ 时,设备受限路由的效果可以大致匹配不受限的 top-K 路由。
2.2.3. 负载均衡的辅助损失(Auxiliary Loss for Load Balance)
作者在自动学习的路由策略中引入了负载均衡机制。
- 负载不均衡会导致路由塌陷(routing collapse)(Shazeer et al., 2017),即部分专家可能无法得到充分训练和利用。
- 在专家并行(expert parallelism)机制下,负载不均衡会降低计算效率。
在 DeepSeek-V2 训练过程中,我们设计了三种辅助损失(auxiliary losses),分别用于控制:
- 专家级负载均衡( $L_{\text{ExpBal}}$ ),
- 设备级负载均衡( $L_{\text{DevBal}}$ ),
- 通信均衡( $L_{\text{CommBal}}$ )。
这三种损失函数协同作用,确保 DeepSeek-V2 在计算资源受限的条件下,仍能高效训练高性能 MoE 模型。
2.2.4. Token-Dropping 策略
虽然平衡损失有助于实现负载平衡,但它无法完全保证负载的严格平衡。为了解决负载不平衡带来的计算浪费,作者在训练中引入了设备级的 Token-Dropping 策略。该策略首先计算每个设备的平均计算预算,将每个设备的容量因子设为 1.0。然后,借鉴 Riquelme 等人(2021)的思路,我们会丢弃每个设备上亲和度最低的 token,直到达成计算预算。此外,我们还确保约 10% 的训练序列中的 token 不会被丢弃。这样,在推理过程中,我们可以灵活地根据效率需求选择是否丢弃 token,同时保持训练和推理的一致性。